AFL 漏洞挖掘技术漫谈(二):Fuzz 结果分析和代码覆盖率
作者:天融信阿尔法实验室
公众号:https://mp.weixin.qq.com/s/WMfCNN095-PpM0VB_pRESg
一、前言
阿尔法实验在上一篇文章中向大家介绍了使用AFL开始模糊测试前要做的一些准备工作,以及AFL的几种工作方式,但是并没有提到何时结束测试过程,以及测试完成后又需要做些什么。本文中就继续介绍这些内容,并开始逐步介绍一些AFL相关原理。以下就是本文中主要讨论的问题:
- 何时结束Fuzzing工作
- afl-fuzz生成了哪些文件
- 如何对产生的crash进行验证和分类
- 用什么来评估Fuzzing的结果
- 代码覆盖率及相关概念
- AFL是如何记录代码覆盖率的
二、Fuzzer工作状态
因为afl-fuzz永远不会停止,所以何时停止测试很多时候就是依靠afl-fuzz提供的状态来决定的。除了前面提到过的通过状态窗口、afl-whatsup查看afl-fuzz状态外,这里再补充几种方法。
1. afl-stat
afl-stat是afl-utils这套工具AFL辅助工具中的一个(这套工具中还有其他更好用的程序,后面用到时会做介绍),该工具类似于afl-whatsup的输出结果。
使用前需要一个配置文件,设置每个afl-fuzz实例的输出目录:
{ "fuzz_dirs": [
"/root/syncdir/SESSION000",
"/root/syncdir/SESSION001",
...
"/root/syncdir/SESSION00x"
]
}
然后指定配置文件运行即可:
$ afl-stats -c afl-stats.conf[SESSION000 on fuzzer1]
Alive: 1/1
Execs: 64 m
Speed: 0.3 x/s
Pend: 6588/249
Crashes: 101
[SESSION001 on fuzzer1]
Alive: 1/1
Execs: 105 m
Speed: 576.6 x/s
Pend: 417/0
Crashes: 291
...
2. 定制afl-whatsup
afl-whatsup是依靠读afl-fuzz输出目录中的fuzzer_stats文件来显示状态的,每次查看都要需要手动执行,十分麻烦。因此可以对其进行修改,让其实时显示fuzzer的状态。方法也很简答,基本思路就是在所有代码外面加个循环就好,还可以根据自己的喜好做些调整:

3. afl-plot
前面提到的都是基于命令行的工具,如果还想要更直观的结果,可以用afl-plot绘制各种状态指标的直观变化趋势。
#安装依赖工具gnuplot$ apt-get install gnuplot
$ afl-plot afl_state_dir graph_output_dir
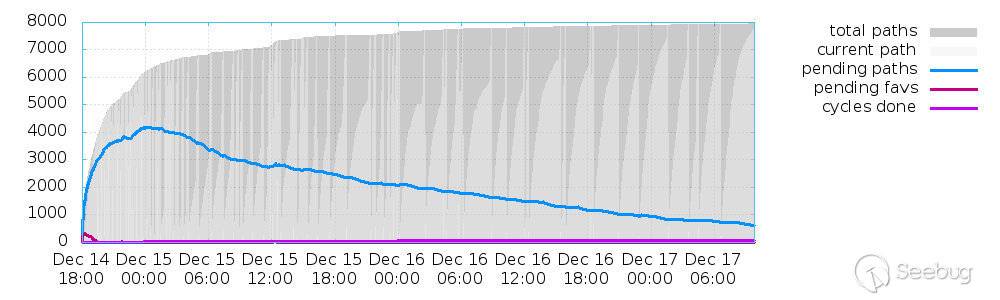
以测试libtiff的情况为例,进入afl-plot输出目录,打开index.html,会看到下面三张图:
首先是路径覆盖的变化,当pending fav的数量变为零并且total paths数量基本上没有再增长时,说明fuzzer有新发现的可能性就很小了。
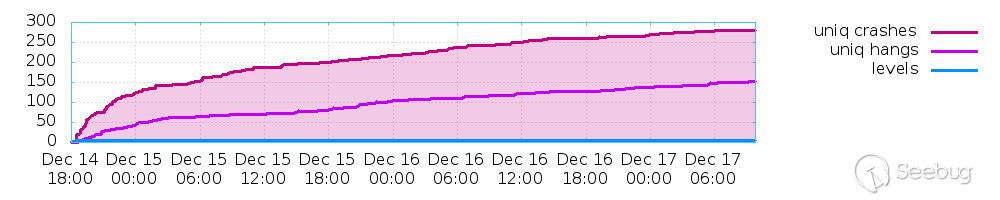
接着是崩溃和超时的变化
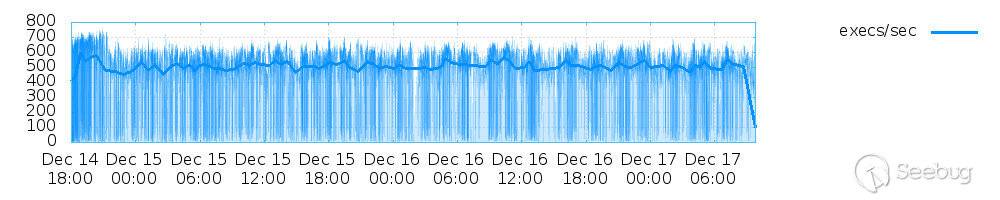
最后是执行速度的变化,这里要注意的是,如果随着时间的推移,执行速度越来越慢,有一种可能是因为fuzzer耗尽一些共享资源。
4. PYTHIA
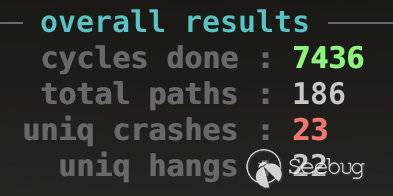
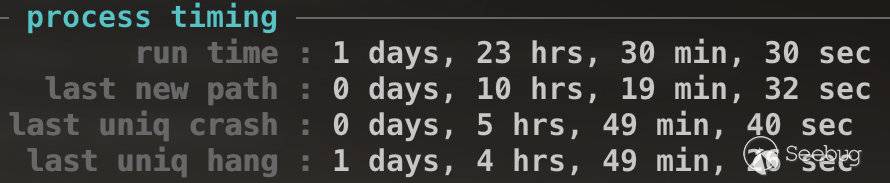
笔者在查阅资料的过程中,还发现了pythia这个AFL的扩展项目,虽然不知道效果如何,但这里还是顺便提一提。其特色在于可以估算发现新crash和path概率,其运行界面相比原版的AFL多出了下面几个字段: 
correctness: 在没有发现crash时,发现一个导致crash输入的概率。 fuzzability: 表示在该程序中发现新路径的难度,该数值越高代表程序越容易Fuzz。 current paths: 显示当前发现的路径数。 path coverag: 路径覆盖率。
三、结束测试
1.何时结束
检查afl-fuzz工作状态的目的是为何时停止测试提供依据,通常来说符合下面几种情况时就可以停掉了。
(1) 状态窗口中”cycles done”字段颜色变为绿色该字段的颜色可以作为何时停止测试的参考,随着周期数不断增大,其颜色也会由洋红色,逐步变为黄色、蓝色、绿色。当其变为绿色时,继续Fuzzing下去也很难有新的发现了,这时便可以通过Ctrl-C停止afl-fuzz。
(2) 距上一次发现新路径(或者崩溃)已经过去很长时间了,至于具体多少时间还是需要自己把握,比如长达一个星期或者更久估计大家也都没啥耐心了吧。
(3) 目标程序的代码几乎被测试用例完全覆盖,这种情况好像很少见,但是对于某些小型程序应该还是可能的,至于如何计算覆盖率将在下面介绍。
(4)上面提到的pythia提供的各种数据中,一旦path covera达到99%(通常来说不太可能),如果不期望再跑出更多crash的话就可以中止fuzz了,因为很多crash可能是因为相同的原因导致的;还有一点就是correctness的值达到1e-08,根据pythia开发者的说法,这时从上次发现path/uniq crash到下一次发现之间大约需要1亿次执行,这一点也可以作为衡量依据。
2. 输出结果
afl-fuzz的输出目录中存在很多文件,有时想要写一个辅助工具可能就要用到其中的文件。下面以多个fuzz实例并行测试时的同步目录为例:
$ tree -L 3.
├── fuzzer1
│ ├── crashes
│ │ ├── id:000000,sig:06,src:000019+000074,op:splice,rep:2
│ │ ├── ...
│ │ ├── id:000002,sig:06,src:000038+000125,op:splice,rep:4
│ │ └── README.txt
│ ├── fuzz_bitmap
│ ├── fuzzer_stats
│ ├── hangs
│ │ └── id:000000,src:000007,op:flip1,pos:55595
│ ├── plot_data
│ └── queue
│ ├── id:000000,orig:1.png
│ ├── ....
│ └── id:000101,sync:fuzzer10,src:000102
└── fuzzer2
├── crashes
├── ...
queue:存放所有具有独特执行路径的测试用例。
crashes:导致目标接收致命signal而崩溃的独特测试用例。
crashes/README.txt:保存了目标执行这些crash文件的命令行参数。
hangs:导致目标超时的独特测试用例。
fuzzer_stats:afl-fuzz的运行状态。
plot_data:用于afl-plot绘图。
四、处理测试结果
到了这里,我们可能已经跑出了一大堆的crashes,那么接下来的步骤,自然是确定造成这些crashes的bug是否可以利用,怎么利用?这是另一个重要方面。当然,个人觉得这比前面提到的内容都要困难得多,这需要对常见的二进制漏洞类型、操作系统的安全机制、代码审计和调试等内容都有一定深度的了解。但如果只是对crash做简单的分析和分类,那么下面介绍的几种方法都可以给我们提供一些帮助。
1. crash exploration mode
这是afl-fuzz的一种运行模式,也称为peruvian rabbit mode,用于确定bug的可利用性,具体细节可以参考lcamtuf的博客。
$ afl-fuzz -m none -C -i poc -o peruvian-were-rabbit_out -- ~/src/LuPng/a.out @@ out.png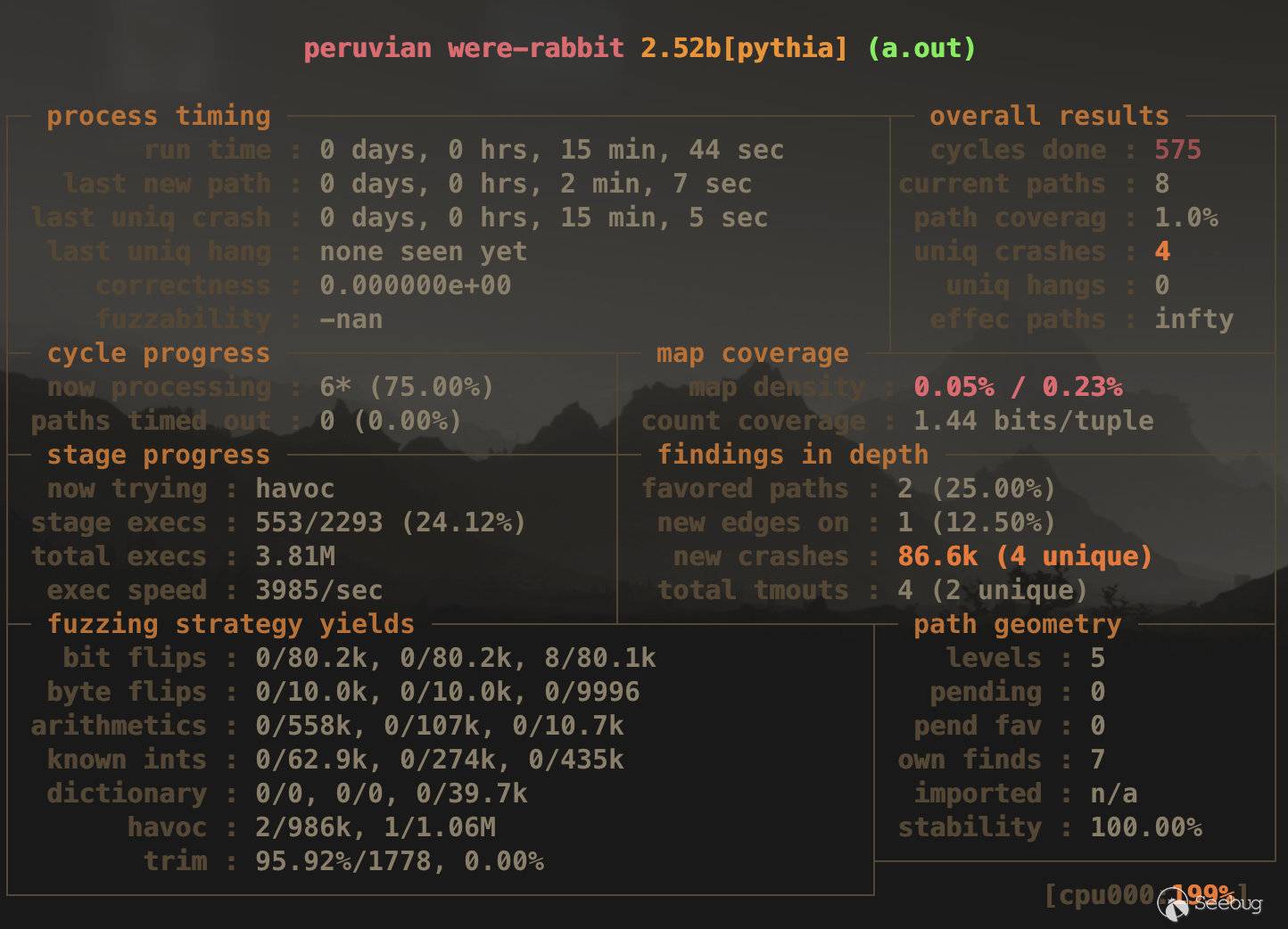
举个例子,当你发现目标程序尝试写入\跳转到一个明显来自输入文件的内存地址,那么就可以猜测这个bug应该是可以利用的;然而遇到例如NULL pointer dereferences这样的漏洞就没那么容易判断了。
将一个导致crash测试用例作为afl-fuzz的输入,使用-C选项开启crash exploration模式后,可以快速地产生很多和输入crash相关、但稍有些不同的crashes,从而判断能够控制某块内存地址的长度。这里笔者在实践中没有找到适合的例子,但在一篇文章中发现了一个很不错的例子——tcpdump栈溢出漏洞,crash exploration模式从一个crash产生了42个新的crash,并读取不同大小的相邻内存。

2. triage_crashes
AFL源码的experimental目录中有一个名为triage_crashes.sh的脚本,可以帮助我们触发收集到的crashes。例如下面的例子中,11代表了SIGSEGV信号,有可能是因为缓冲区溢出导致进程引用了无效的内存;06代表了SIGABRT信号,可能是执行了abort\assert函数或double free导致,这些结果可以作为简单的参考。
$ ~/afl-2.52b/experimental/crash_triage/triage_crashes.sh fuzz_out ~/src/LuPng/a.out @@ out.png 2>&1 | grep SIGNAL +++ ID 000000, SIGNAL 11 +++
+++ ID 000001, SIGNAL 06 +++
+++ ID 000002, SIGNAL 06 +++
+++ ID 000003, SIGNAL 06 +++
+++ ID 000004, SIGNAL 11 +++
+++ ID 000005, SIGNAL 11 +++
+++ ID 000006, SIGNAL 11 +++
...
3. crashwalk
当然上面的两种方式都过于鸡肋了,如果你想得到更细致的crashes分类结果,以及导致crashes的具体原因,那么crashwalk就是不错的选择之一。这个工具基于gdb的exploitable插件,安装也相对简单,在ubuntu上,只需要如下几步即可:
$ apt-get install gdb golang$ mkdir tools
$ cd tools
$ git clone https://github.com/jfoote/exploitable.git
$ mkdir go
$ export GOPATH=~/tools/go
$ export CW_EXPLOITABLE=~/tools/exploitable/exploitable/exploitable.py
$ go get -u github.com/bnagy/crashwalk/cmd/...
crashwalk支持AFL/Manual两种模式。前者通过读取crashes/README.txt文件获得目标的执行命令(前面第三节中提到的),后者则可以手动指定一些参数。两种使用方式如下:
#Manual Mode$ ~/tools/go/bin/cwtriage -root syncdir/fuzzer1/crashes/ -match id -- ~/parse @@
#AFL Mode
$ ~/tools/go/bin/cwtriage -root syncdir -afl
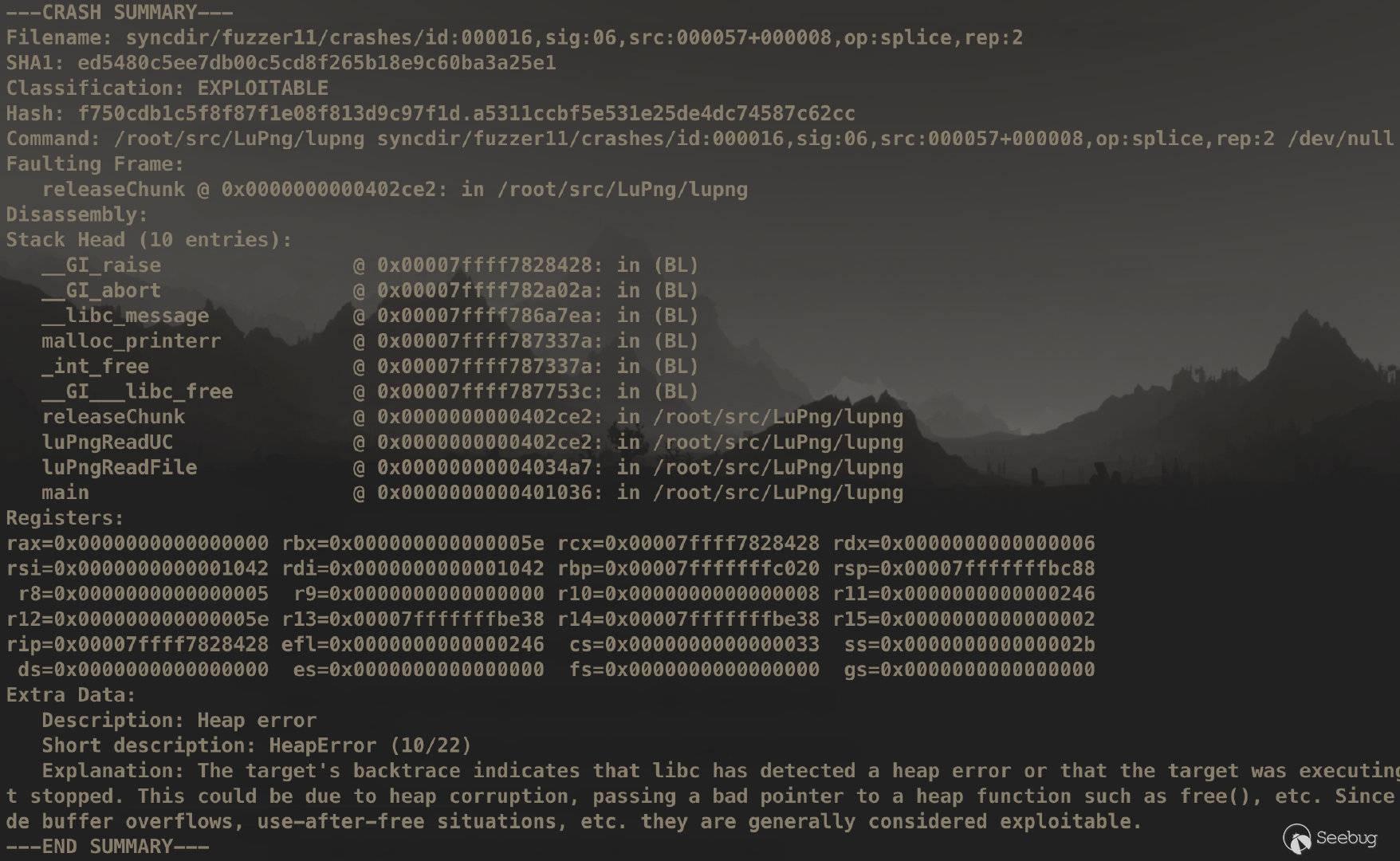
两种模式的输出结果都一样,如上图所示。这个工具比前面几种方法要详细多了,但当有大量crashes时结果显得还是十分混乱。
4. afl-collect
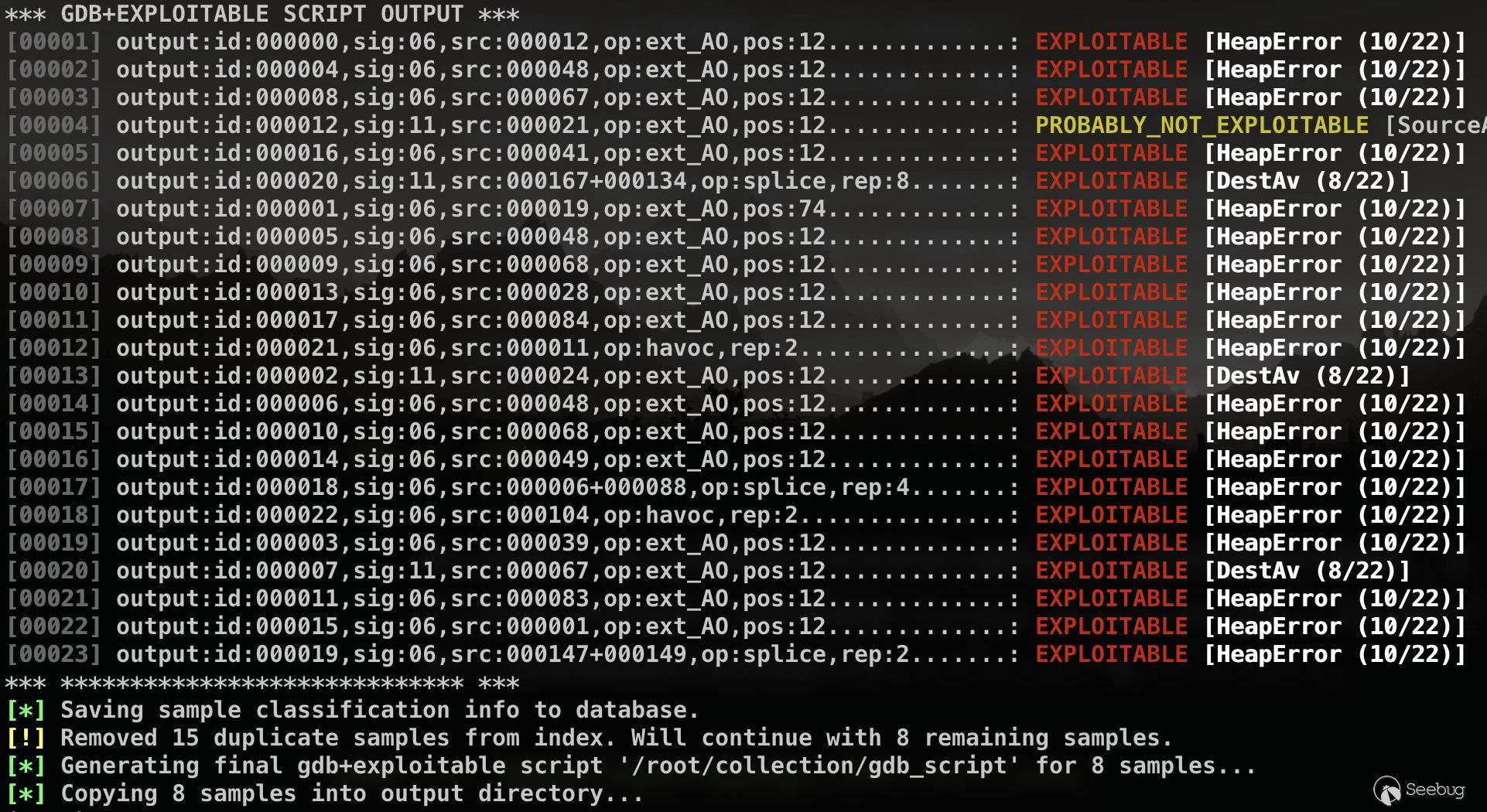
最后重磅推荐的工具便是afl-collect,它也是afl-utils套件中的一个工具,同样也是基于exploitable来检查crashes的可利用性。它可以自动删除无效的crash样本、删除重复样本以及自动化样本分类。使用起来命令稍微长一点,如下所示:
$ afl-collect -j 8 -d crashes.db -e gdb_script ./afl_sync_dir ./collection_dir -- /path/to/target --target-opts但是结果就像下面这样非常直观:
五、代码覆盖率及其相关概念
代码覆盖率是模糊测试中一个极其重要的概念,使用代码覆盖率可以评估和改进测试过程,执行到的代码越多,找到bug的可能性就越大,毕竟,在覆盖的代码中并不能100%发现bug,在未覆盖的代码中却是100%找不到任何bug的,所以本节中就将详细介绍代码覆盖率的相关概念。
1. 代码覆盖率(Code Coverage)
代码覆盖率是一种度量代码的覆盖程度的方式,也就是指源代码中的某行代码是否已执行;对二进制程序,还可将此概念理解为汇编代码中的某条指令是否已执行。其计量方式很多,但无论是GCC的GCOV还是LLVM的SanitizerCoverage,都提供函数(function)、基本块(basic-block)、边界(edge)三种级别的覆盖率检测,更具体的细节可以参考LLVM的官方文档。
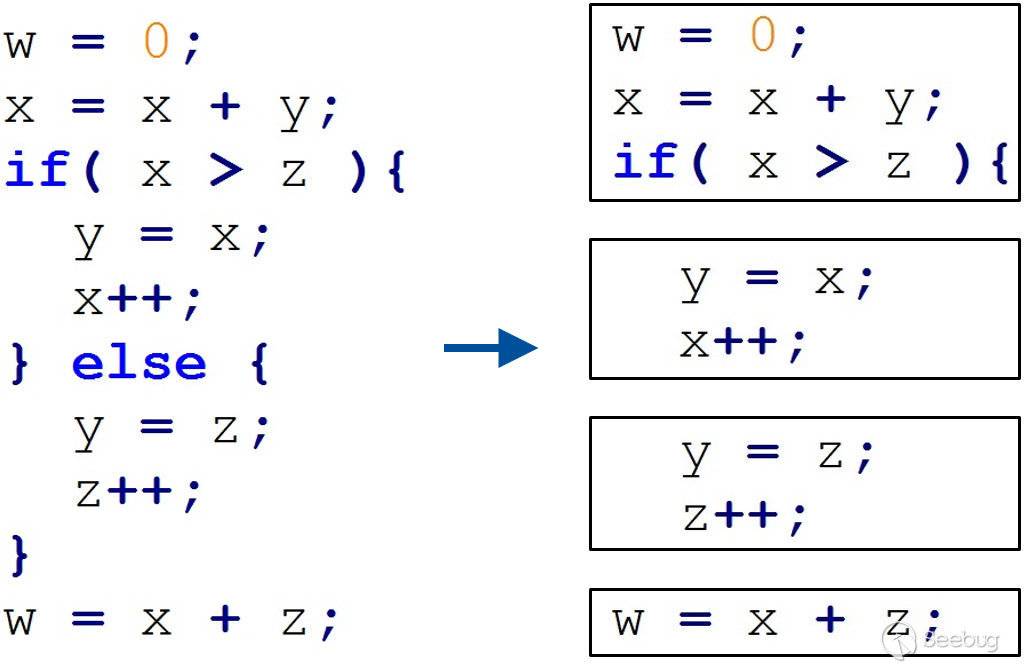
2. 基本块(Basic Block)
缩写为BB,指一组顺序执行的指令,BB中第一条指令被执行后,后续的指令也会被全部执行,每个BB中所有指令的执行次数是相同的,也就是说一个BB必须满足以下特征:
- 只有一个入口点,BB中的指令不是任何跳转指令的目标。
- 只有一个退出点,只有最后一条指令使执行流程转移到另一个BB
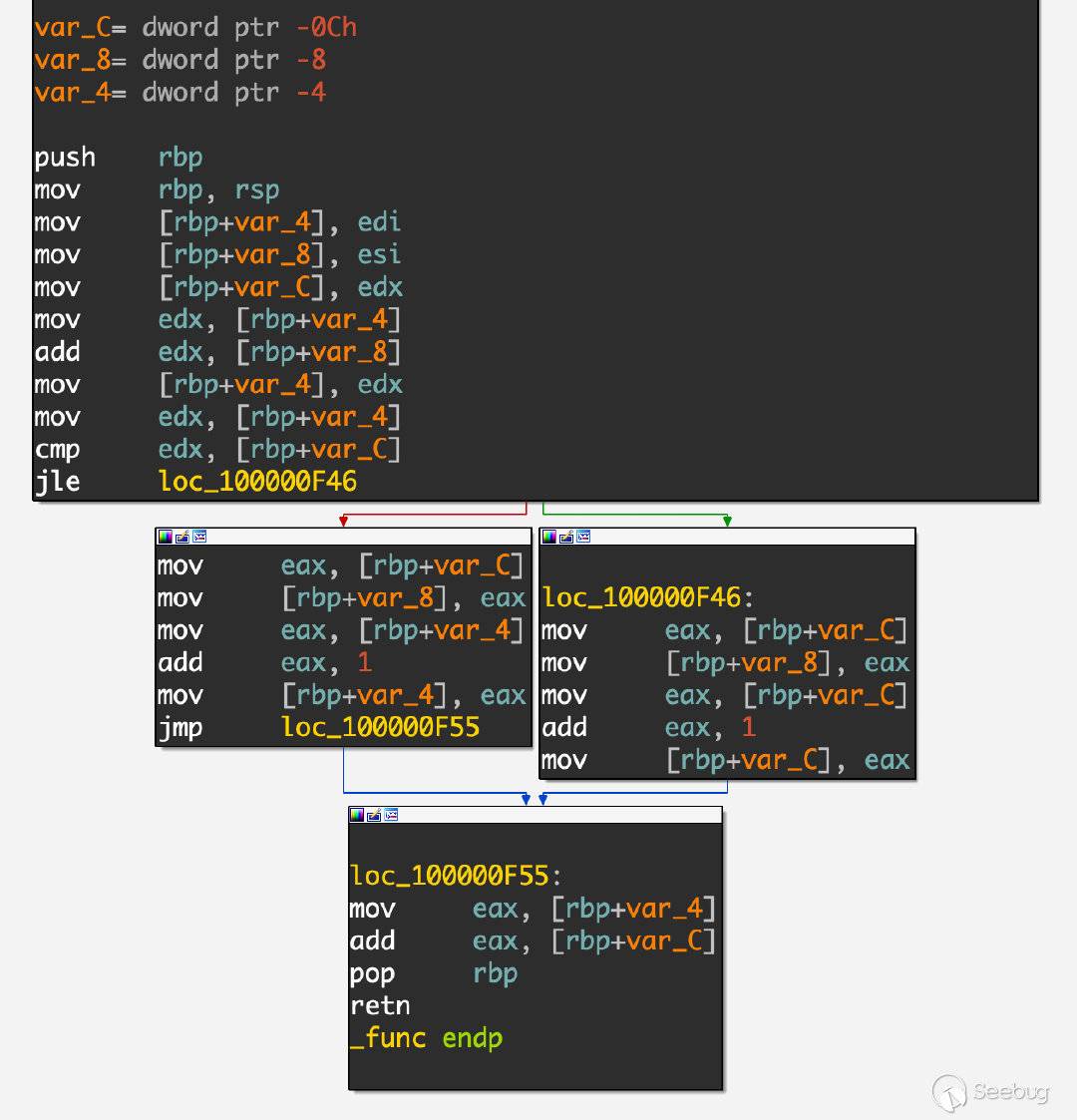
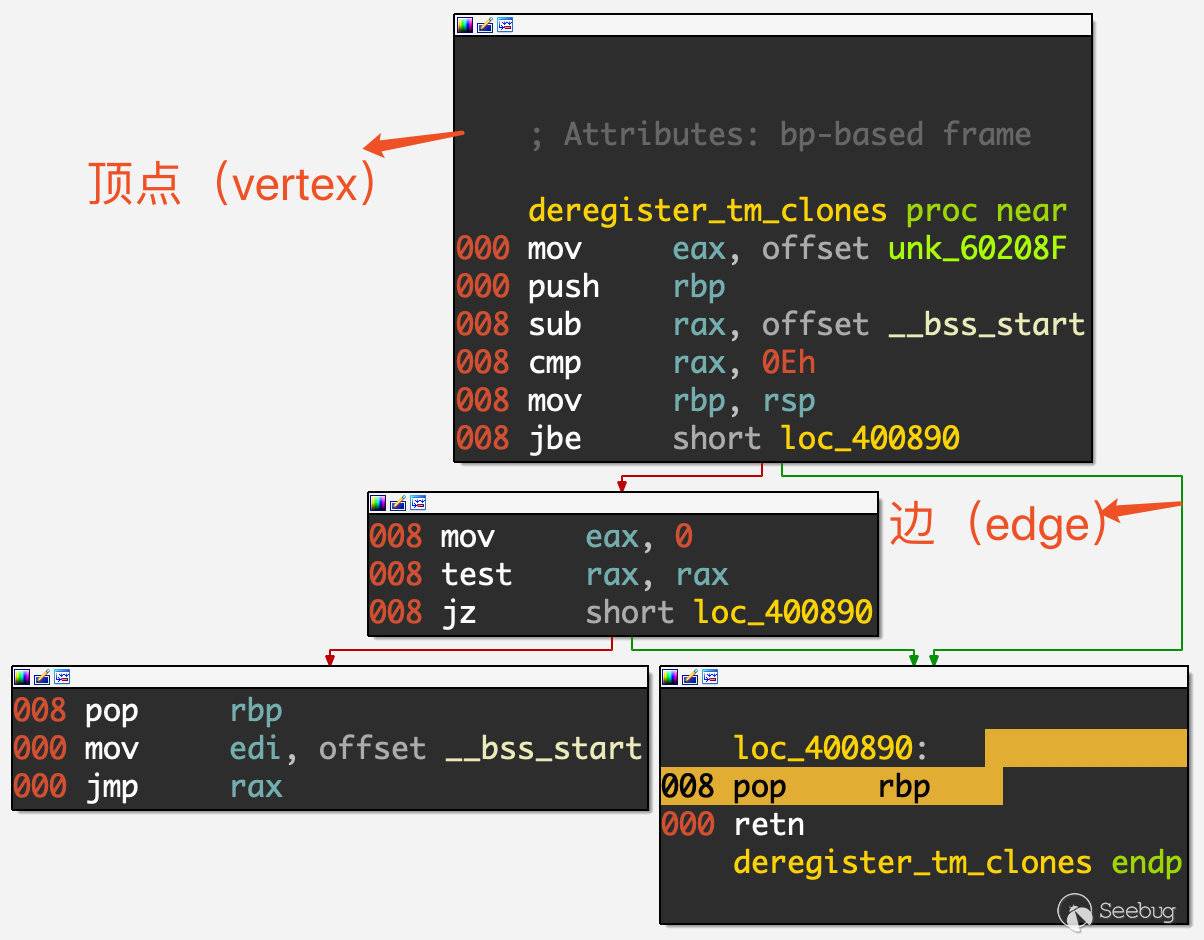
例如下图中的代码就可以被切割为4个基本块,平时我们在IDA图形模式中看到的就是一个一个的基本块
将上面的程序拖进IDA,可以看到同样被划分出了4个基本块:
3. 边(edge)
AFL的技术白皮书中提到fuzzer通过插桩代码捕获边(edge)覆盖率。那么什么是edge呢?我们可以将程序看成一个控制流图(CFG),图的每个节点表示一个基本块,而edge就被用来表示在基本块之间的转跳。知道了每个基本块和跳转的执行次数,就可以知道程序中的每个语句和分支的执行次数,从而获得比记录BB更细粒度的覆盖率信息。
4. 元组(tuple)
具体到AFL的实现中,使用二元组(branch_src, branch_dst)来记录当前基本块 + 前一基本块 的信息,从而获取目标的执行流程和代码覆盖情况,伪代码如下:
cur_location = <COMPILE_TIME_RANDOM>; //用一个随机数标记当前基本块shared_mem[cur_location ^ prev_location]++; //将当前块和前一块异或保存到shared_mem[]
prev_location = cur_location >> 1; //cur_location右移1位区分从当前块到当前块的转跳
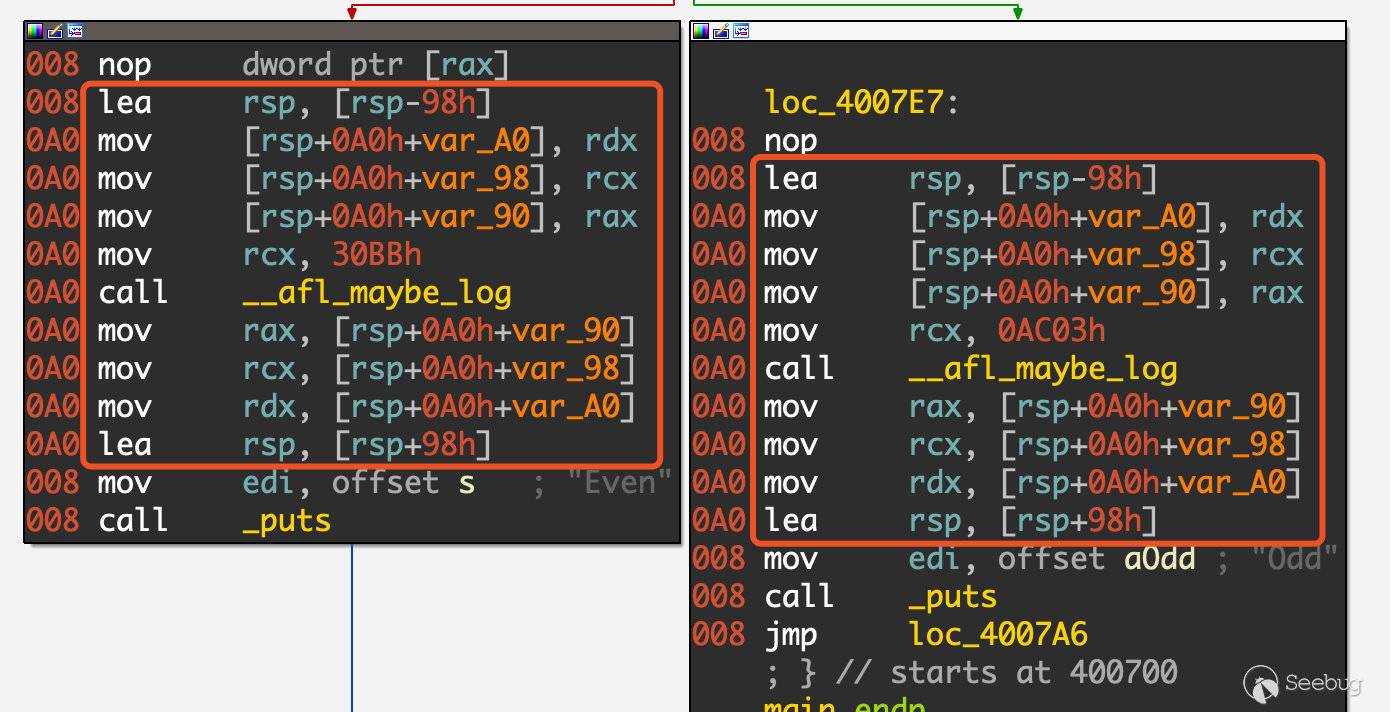
实际插入的汇编代码,如下图所示,首先保存各种寄存器的值并设置ecx/rcx,然后调用__afl_maybe_log,这个方法的内容相当复杂,这里就不展开讲了,但其主要功能就和上面的伪代码相似,用于记录覆盖率,放入一块共享内存中。
六、计算代码覆盖率
了解了代码覆盖率相关的概念后,接下来看看如何计算我们的测试用例对前面测试目标的代码覆盖率。
这里需要用到的工具之一是GCOV,它随gcc一起发布,所以不需要再单独安装,和afl-gcc插桩编译的原理一样,gcc编译时生成插桩的程序,用于在执行时生成代码覆盖率信息。
另外一个工具是LCOV,它是GCOV的图形前端,可以收集多个源文件的gcov数据,并创建包含使用覆盖率信息注释的源代码HTML页面。
最后一个工具是afl-cov,可以快速帮助我们调用前面两个工具处理来自afl-fuzz测试用例的代码覆盖率结果。在ubuntu中可以使用apt-get install afl-cov安装afl-cov,但这个版本似乎不支持分支覆盖率统计,所以还是从Github下载最新版本为好,下载完无需安装直接运行目录中的Python脚本即可使用:
$ apt-get install lcov$ git clone https://github.com/mrash/afl-cov.git
$ ./afl-cov/afl-cov -V
afl-cov-0.6.2
还是以Fuzz libtiff为例,计算Fuzzing过程的代码覆盖率流程如下:
第一步,使用gcov重新编译源码,在CFLAGS中添加"-fprofile-arcs"和"-ftest-coverage"选项,可以在--prefix中重新指定一个新的目录以免覆盖之前alf插桩的二进制文件。
$ make clean$ ./configure --prefix=/root/tiff-4.0.10/build-cov CC="gcc" CXX="g++" CFLAGS="-fprofile-arcs -ftest-coverage" --disable-shared
$ make
$ make install
第二步,执行afl-cov。其中-d选项指定afl-fuzz输出目录;—live用于处理一个还在实时更新的AFL目录,当afl-fuzz停止时,afl-cov将退出;–enable-branch-coverage用于开启边缘覆盖率(分支覆盖率)统计;-c用于指定源码目录;最后一个-e选项用来设置要执行的程序和参数,其中的AFL_FILE和afl中的”@@”类似,会被替换为测试用例,LD_LIBRARY_PATH则用来指定程序的库文件。
$ cd ~/tiff-4.0.10$ afl-cov -d ~/syncdir --live --enable-branch-coverage -c . -e "cat AFL_FILE | LD_LIBRARY_PATH=./build-cov/lib ./build-cov/bin/tiff2pdf AFL_FILE"
成功执行的结果如下所示:
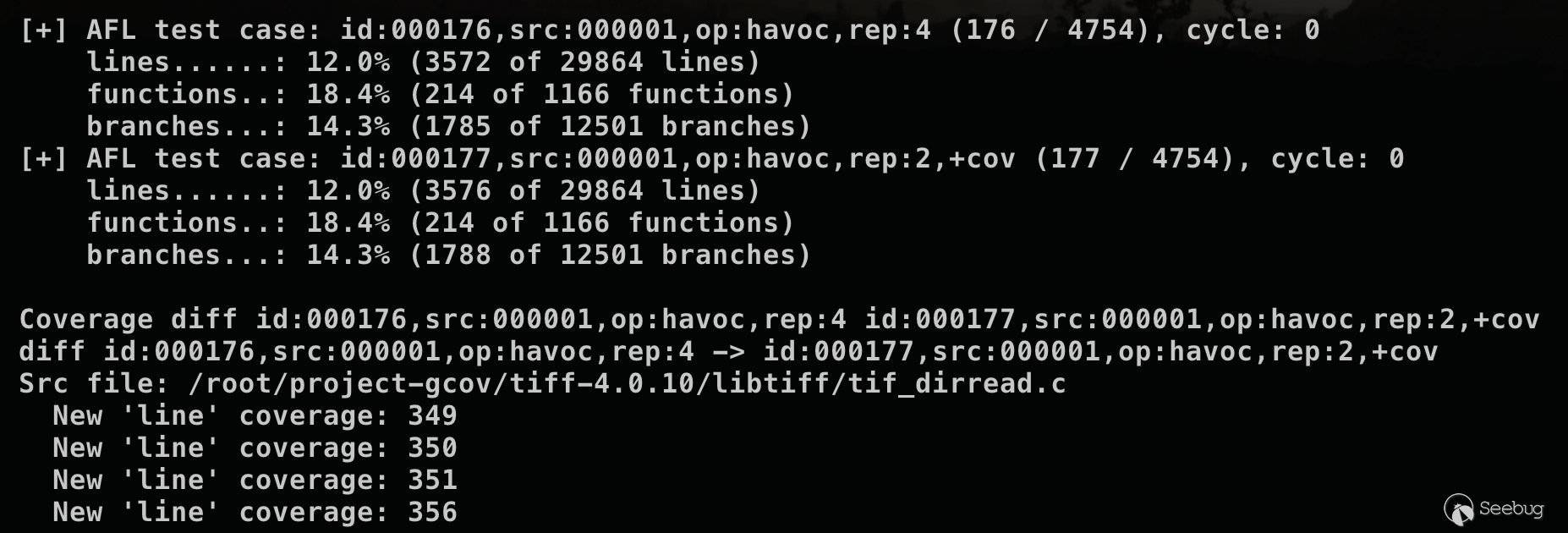
我们可以通过—live选择,在fuzzer运行的同时计算覆盖率,也可以在测试结束以后再进行计算,最后会得到一个像下面这样的html文件。它既提供了概述页面,显示各个目录的覆盖率;也可以在点击进入某个目录查看某个具体文件的覆盖率。
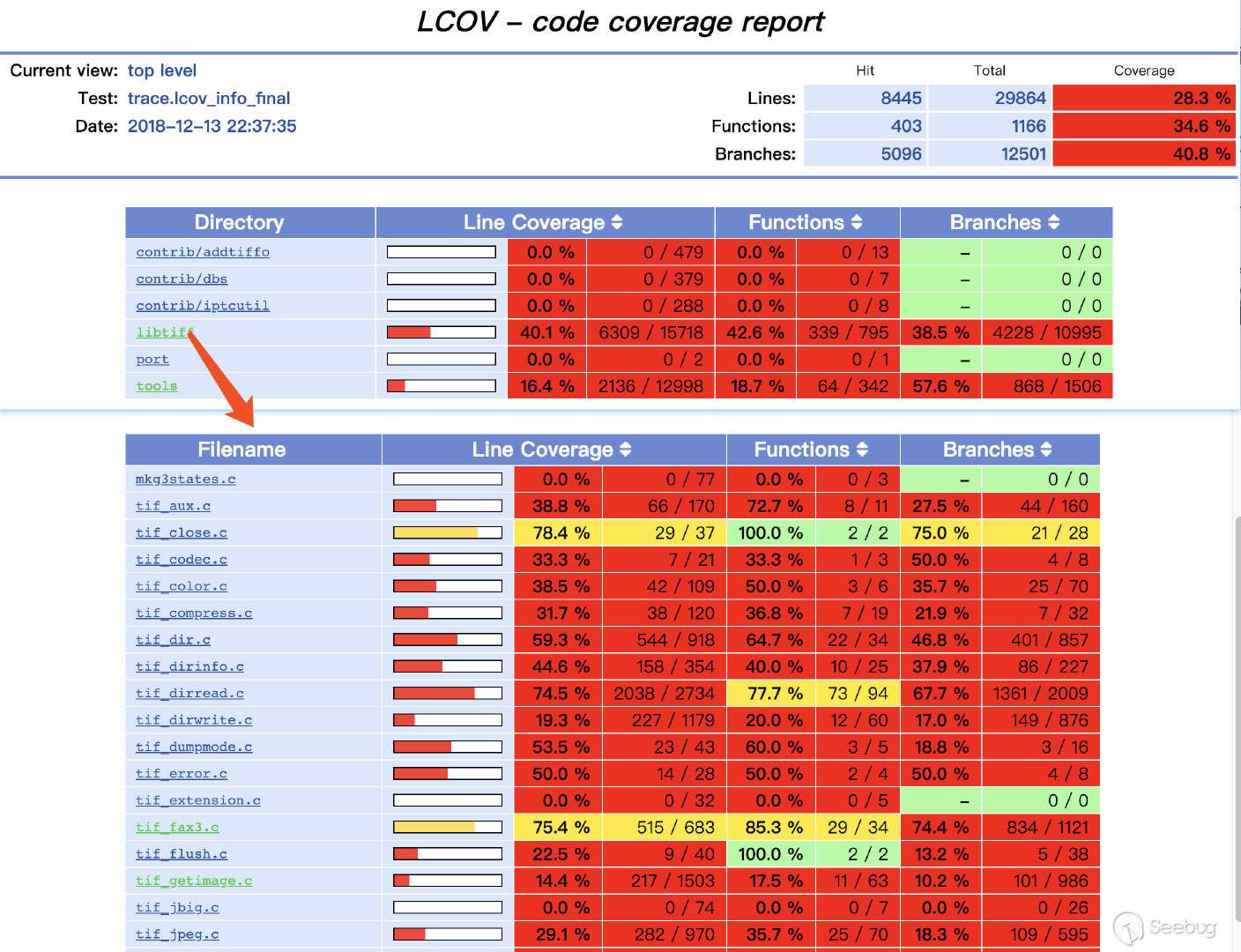
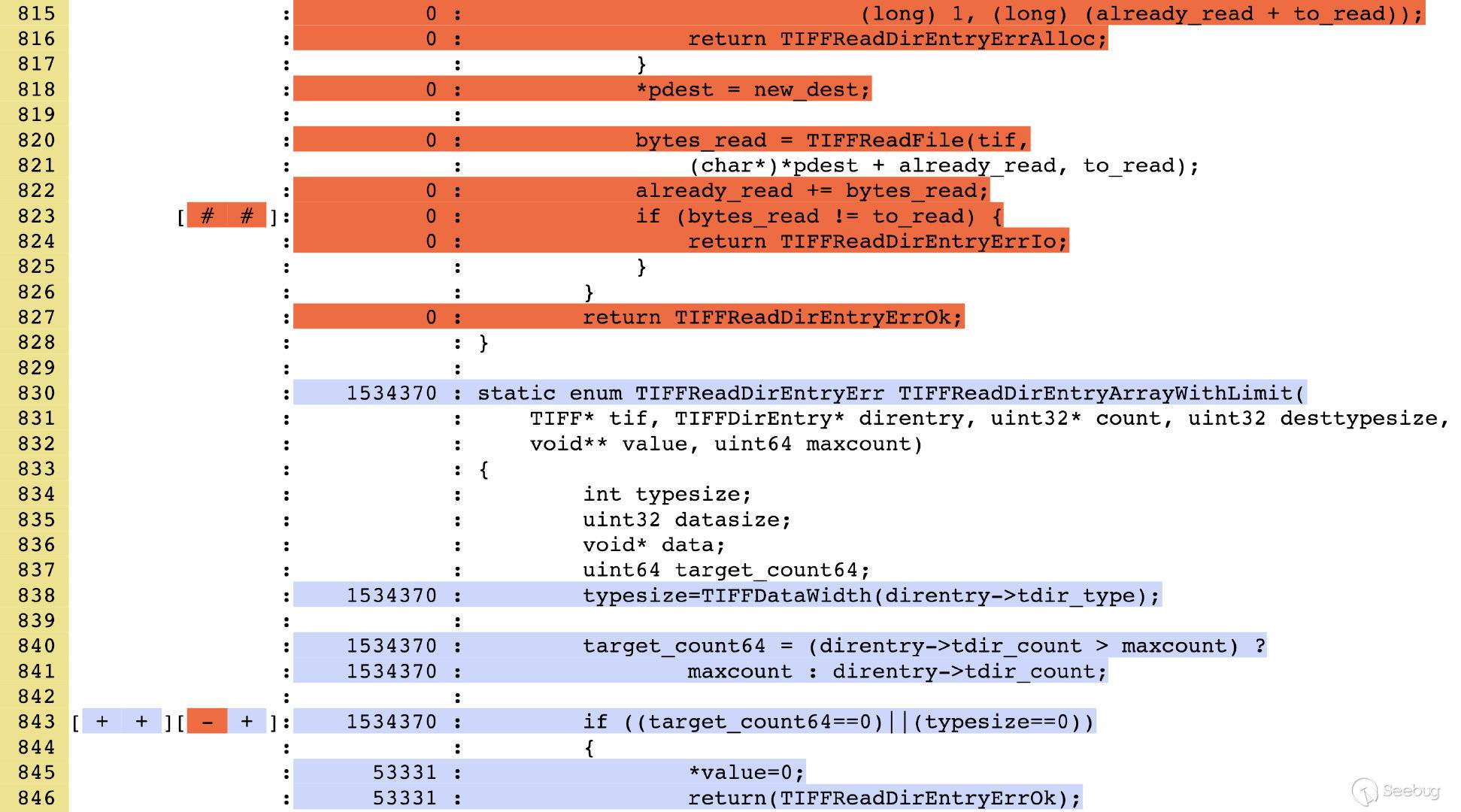
点击进入每个文件,还有更详细的数据。每行代码前的数字代表这行代码被执行的次数,没有执行过的代码会被红色标注出来。
参考资料
[1] INTRO TO AMERICAN FUZZY LOP – FUZZING WITH ASAN AND BEYOND
[2] Fuzzing with AFL
[3] Clang 9 documentation – SanitizerCoverage
[5] How Much Test Coverage Is Enough For Your Testing Strategy?
以上是 AFL 漏洞挖掘技术漫谈(二):Fuzz 结果分析和代码覆盖率 的全部内容, 来源链接: utcz.com/p/199254.html