图表示学习:图神经网络
这是图表示学习(representation learning)的第二部分——神经网络" title="图神经网络">图神经网络(graph neural network, gnn),主要涉及GCN [ICLR’17]、GraphSAGE [NeurIPS’17]、GAT [ICLR’18]和C&S [Arxiv:2010.13993]三篇论文。
关于图数据挖掘/表示学习的内容强烈建议去看Stanford Jure Leskovec的Tutorial - Representation Learning on Networks (WWW’18)。
前一节的图嵌入方法都是非常浅(shallow)的,通过学习得到一个矩阵/查找表,来得到结点的嵌入向量。但是这种方法有以下几点缺陷:
- 需要$O(\vert V\vert)$的参数量:没有任何参数的共享,所有结点都只有它自己的嵌入向量
- 内在传导(transductive):很难生成一个没见过的结点的嵌入
- 无监督方法:没有将结点特征有机整合,而只是关注于图结构
因此我们希望采用更深的方法来得到结点嵌入,最好是直接学习得到一个连续函数,而不是表格映射(这个发展路径其实跟当年强化学习到深度强化学习的过程是类似的)。
回忆稠密网格下的卷积1,原来格点上的数据通过与卷积核的参数分别相乘求和,最后邻居格点的加权和都会汇总到中心格点上。由于卷积核滑过整个图片,而其中的参数多次被使用(参数共享),因此可以更好捕获图片的细节特征。
- 图神经网络")
类比到图数据也是一样的,核心思想是从邻居结点整合特征,只是邻居不再是原来的网格紧邻,且每个结点的邻居数目也不一定相同。
聚合特征之后通过黑箱网络,对输出拟合。如下图所示,0层即输入层,也即输入特征。
- 图神经网络")
所以关键在于黑箱中是什么,也即聚合信息的方法。
最简单的方式,取平均然后过神经网络。
- 图神经网络")
或用矩阵的形式表示($H^{(0)}=X$)
\[H^{(k+1)}=f(H^{(k)},A)=\sigma(AH^{(k)}W^{(k)})\]
其中$A\in\mathbb{R}^{n\times n}$为邻接阵,$H\in\mathbb{R}^{n\times d_{in}}$为特征阵(注意这里一行为一个结点的嵌入向量,与前面的向量写法不同),$W\in\mathbb{R}^{d_{in}\times d_{out}}$为每一层的训练权重矩阵(注意到这里是全层共享参数)。这里可划分为两个步骤:消息聚合与特征更新。
第一部分消息聚合,即$A$与$H$左乘(稀疏矩阵乘稠密矩阵,图计算),相当于考虑$A$的第$i$行,即第$i$个结点$v_i$,与其邻接的结点的第$j$个特征进行聚合,得到$(i,j)$矩阵元素。
\[(AH^{(k)})_{ij}=\sum_{l}a_{il}h_{lj}=\sum_{v_l\in \mathcal{N}(v_i)}h_{v_l j}
\implies \mathbf{h}_i=\sum_{v_l\in \mathcal{N}(v_i)}\mathbf{h}_{l}\]
第二部分特征更新,将聚合的特征与参数矩阵相乘(稠密阵乘稠密阵,深度学习)
\[\mathbf{h}_i^{(k+1)}=\left(\sum_{v_l\in \mathcal{N}(v_i)}\mathbf{h}_{l}^{(k)}\right)W^{(k)}
=\sum_{v_l\in \mathcal{N}(v_i)}\mathbf{h}_{l}^{(k)}W^{(k)}\]
由于矩阵乘符合结合律,故消息聚合与特征更新顺序可以互换。
如果先聚合再算更新,则对于结点$i$来说需要做$d_i$次维度$d_{in}$的加法与$1$次乘法$d_{in}\mapsto d_{out}$,由握手定理,全图一共是$2|E|$次加法与$|V|$次矩阵向量乘(或$1$次矩阵矩阵乘);而先更新再聚合,对于结点$i$需要做$d_i$次维度$d_{out}$的加法与$d_i$次乘法,全图则是$O(|E|)$的时间复杂度。但事实上由于邻居结点会被多个结点共享,因此用矩阵矩阵乘提前算出$H^{(k)}W^{(k)}$,再去索引聚合,乘法次数同样是$1$次。
这里就可以采用前面的无监督方法作为损失函数,或者用有监督的模型来构造。
总的来说,GNN的模型构造分为以下四步走:
- 定义邻居聚集函数(黑箱中是什么)
- 定义结点嵌入上的损失函数$L(z_u)$
- 对一系列的结点计算图进行训练
- 生成结点嵌入
注意到$W_k$和$B_k$都是共享参数,因此模型参数的复杂度是关于$\vert V\vert$次线性的。同时,这种方法可以扩展到未见过的结点。
GCN2
关于GCN的详细介绍,可见论文一作的博客。
依照上文的矩阵表示法,
\[H^{(k+1)}=f(H^{(k)},A)=\sigma(AH^{(k)}W^{(k)})\]
尽管该模型已经很强大,但是仍然存在以下两个问题,这也是文2所要解决的:
- 注意到$AH^{(k)}$消息聚合时并未将自身考虑进去,因此可以简单地给每个结点添加自环,即$\hat{A}=A+I$
- 每个结点的度并不相同,导致$AH^{(k)}$计算时会改变特征向量的比例(scale),那么简单的想法是类似PageRank一样对邻接阵$A$的每一行归一化,即$D^{-1}A$,其中$D$是度对角阵(取逆相当于对角线上元素,即每个结点的度数,直接取倒数)。而如果采用对称的归一化技术(即出入度都考虑),那就得到$D^{-1/2}AD^{-1/2}$。(对称阵的计算可见图论基础)
进而得到GCN的传播规则
\[H^{(k+1)}=f(H^{(k)},A)=\sigma\left(\hat{D}^{-\frac{1}{2}}\hat{A}\hat{D}^{-\frac{1}{2}}H^{(k)}W^{(k)}\right)\]
用向量形式来写即
\[\mathbf{h}_v^{(k+1)}=\sigma\left(\sum_{u\in N(v)\cup v}\frac{\mathbf{h}_u^{(k)}}{\sqrt{|N(u)||N(v)|}}W^{(k)}\right)\]
总的时间复杂度是$O(\vert E\vert)$。
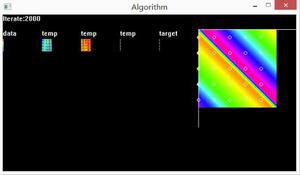
GCN很强的一点在于,它还没训练就已经达到DeepWalk的水准了。比如下图展示的是未训练的3层GCN结点嵌入情况,矩阵都是随机初始化的。
- 图神经网络") | - 图神经网络") |
至于为什么是卷积,想想卷积核在稀疏邻接矩阵上划过,聚合时实际上就相当于做卷积了。
GraphSAGE3
GraphSAGE (SAmple & aggreGatE)则是进一步将聚合的思想一般化,之前的聚合函数都是取平均,那现在我采用任意的聚合函数,得到
\[h_v^{(k+1)}=\sigma([W_k\cdot \mathop{AGG}(\{\mathbb{h}_{u}^{(k)},\forall u\in N(v)\}),B_k\mathbb{h}_v^{(k)}])\]
注意中括号表示两个向量(自嵌入+邻居嵌入)直接合并,邻居在GraphSAGE中并不取全部,而是随机取固定数目的邻居。
聚合函数就可以取
- 平均:最原始方案
\[\mathop{AGG}=\sum_{u\in N(u)}\frac{\mathbb{h}_{u}^{(k)}}{|N(v)|}\]
- 池化:$\gamma$为元素间(element-wise)平均/最值
\[\mathop{AGG}=\gamma(\{Q\mathbb{h}_{u}^{(k)},\forall u\in N(v)\})\]
- LSTM:$\pi$为随机置换(permutation)
\[\mathop{AGG}=LSTM([\mathbb{h}_{u}^{(k)},\forall u\in\pi(N(v))])\]
通常GCN和GraphSAGE只需两三层深即可。
从某种意义上,GCN有点像循环神经网络,因为GCN在每一层上都是共享参数的,而每一层就是一整个graph平展开来,每一层的计算都是传播一hop的计算,只有当这一层计算完了(图遍历完了),才进入到下一层的计算。
- 图神经网络")
从GraphSAGE的伪代码就更加能体会到这一点:外层做$K$次循环,内层遍历所有结点做消息传递(这其实相当于对整个无向图做一次BFS)
- 图神经网络")
GAT 4
回忆NLP中的encoder-decoder模型,由于encoder需要将一整个句子的信息压缩到一个高维空间向量,再送入decoder进行解码,这一个高维空间向量的负担将会非常大,因此研究者就考虑让机器学会判断句子中的不同部分的重要性,从而在解码时更加有针对性地获取特征,此即attention的思想5。
- 图神经网络")
放到graph中也是类似,原始聚合公式中将不同结点等同对待,因此可以添加一个attention模块,让机器自己学习不同结点的重要性$\alpha_{il}$($v_l$对$v_i$的重要性)。
\[\mathbf{h}_i^{(k+1)}=\sum_{v_l\in \mathcal{N}(v_i)}\alpha_{il}\mathbf{h}_{l}^{(k)}W^{(k)}\]
重要性度量可以是$\phi(h_i,h_l)$(注意这里用了原始特征向量$h_\cdot$),其中$\phi$为可学习的函数,GAT论文中直接采用了单层神经网络。
由于重要性的scale可能不同,因此可以通过归一化方法得到合理的重要性度量指标,这里采用了softmax
\[\alpha_{il}=\frac{\exp(\phi(h_i,h_l))}{\sum_{k\in\mathcal{N}(v_i)}\exp(\phi(h_i,h_k))}\]
更进一步,可以采用多头(multi-head)的attention机制,不同head采用不同$\alpha$,最后再将这些结果合并起来或者取平均。
- 图神经网络")
Correct & Smooth (C&S) 6
这篇paper在2020年10月的时候霸榜了OGB的几个数据集,核心是在claim我们不需要GNN这么复杂的模型,用简单的MLP加上一些后处理技巧就可以做到很好的效果了。
分为三步走,第一步用MLP直接暴力拟合(不考虑图结构),第二步correct,第三步smooth。
假设特征矩阵为$X\in\mathbb{R}^{n\times p}$,目标矩阵$Y\in\mathbb{R}^{n\times c}$为one-hot encoding,第一步MLP则是学一个函数$f$使得最小化损失函数之和
\[\sum l(f(X_i),Y_i)\]
可以想象经过$f$得到的是一个softmax的概率,即为各个类别的预测值$\hat{Y}_i$,此为base prediction。
第二步correct,即算预测值和真实值的残差$E=\hat{Y}-Y$,然后用标签传播优化$E$(此时引入图结构,具体优化目标见论文)。这里的idea在于误差应该沿着图的边正相关(base prediction to be positively correlated along edges in the graph),换句话说结点$i$有误差,则其邻居也应该有相似的误差。这一步会得到一个新的估计$\hat{Y}^{(r)}$
第三步smooth,idea是相邻的点应该有相似的label,这样又可以得到另外一个优化函数,再通过另一轮label propagation得到最终结果。
Other Resources
- Stanford Network Analysis Project (SNAP): http://snap.stanford.edu/
- Geometric Deep Learning: http://geometricdeeplearning.com/
- Innovations in Graph Representation Learning: https://ai.googleblog.com/2019/06/innovations-in-graph-representation.html
Reference
- Petar Veličković, https://petar-v.com/GAT/ ↩
- Thomas N. Kipf, Max Welling (Amsterdam), Semisupervised Classification with Graph Convolutional Networks, ICLR, 2017 (Most cited publication) ↩ ↩2
- William L. Hamilton, Rex Ying, Jure Leskovec (Stanford), Inductive Representation Learning on Large Graphs, NeurIPS, 2017 ↩
- Petar Veličković, Guillem Cucurull, Arantxa Casanova, Adriana Romero, Pietro Liò and Yoshua Bengio, Graph Attention Networks, ICLR, 2018 ↩
- Stanford CS224n: Natural Language Processing with Deep Learning, Machine Translation ↩
- Qian Huang, Horace He, Abhay Singh, Ser-Nam Lim, Austin R. Benson (Cornell), Combining Label Propagation and Simple Models Outperforms Graph Neural Networks, Arxiv:2010.13993, 2020 (Code) ↩
以上是 图表示学习:图神经网络 的全部内容, 来源链接: utcz.com/a/128253.html