面试官:来!聊聊线程池的实现原理以及使用时的问题

扫描下方二维码或者微信搜索公众号
菜鸟飞呀飞,即可关注微信公众号,阅读更多Spring源码分析和Java并发编程文章。
前言
无论是在工作中,还是在书本中,我们都可以听到或者看到关于线程在使用时的一些建议:不要在代码中自己直接创建线程,而是通过线程池的方式来使用线程。使用线程池的理由大致可以总结为以下几点。
1.降低资源消耗。线程是操作系统十分宝贵的资源,当多个人同时开发一个项目时,在互不知情的情况下,都自己在代码中创建了线程,这样就会导致线程数过多,而且线程的创建和销毁,在操作系统层面,需要由用户态切换到内核态,这是一个费时费力的过程。而使用线程池可以避免频繁的创建线程和销毁线程,线程池中线程可以重复使用。2.提高响应速度。当请求到达时,由于线程池中的线程已经创建好了,使用线程池,可以省去线程创建的这段时间。3.提高线程的可管理性。线程是稀缺资源,当创建过多的线程时,会造成系统性能的下降,而使用线程池,可以对线程进行统一分配、调优和监控。线程池的使用十分简单,但是会用不代表用得好。在面试中,基本不会问线程池应该怎么用,而是问线程池在使用不当时会造成哪些问题,实际上就是考察线程池的实现原理。因此搞明白线程池的实现原理是很有必要的一件事,不仅仅对面试会有帮助,也会让我们在平时工作中避过好多坑。
实现原理
在线程池中存在几个概念:核心线程数、最大线程数、任务队列。核心线程数指的是线程池的基本大小;最大线程数指的是,同一时刻线程池中线程的数量最大不能超过该值;任务队列是当任务较多时,线程池中线程的数量已经达到了核心线程数,这时候就是用任务队列来存储我们提交的任务。
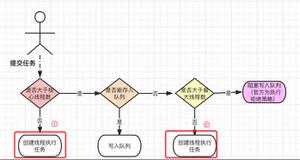
与其他池化技术不同的是,线程池是基于生产者-消费者模式来实现的,任务的提交方是生产者,线程池是消费者。当我们需要执行某个任务时,只需要把任务扔到线程池中即可。线程池中执行任务的流程如下图如下。
1.先判断线程池中线程的数量是否超过核心线程数,如果没有超过核心线程数,就创建新的线程去执行任务;如果超过了核心线程数,就进入到下面流程。2.判断任务队列是否已经满了,如果没有满,就将任务添加到任务队列中;如果已经满了,就进入到下面的流程。3.再判断如果创建一个线程后,线程数是否会超过最大线程数,如果不会超过最大线程数,就创建一个新的线程来执行任务;如果会,则进入到下面的流程。4.执行拒绝策略。
在没看线程池的具体实现之前,我一直存在这样的疑惑:为什么是先判断任务队列有没有满,再判断有没有超过最大线程数?正常逻辑不是应该先尽可能的创建线程,让线程去处理任务吗?当任务实在是太多了,线程处理不过来了,再将任务添加到任务队列吗?知道我看了线程池的具体代码实现后,我才知道答案。问题答案在文末。
ThreadPoolExecutor
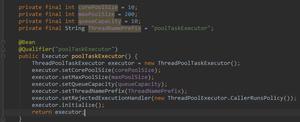
在JUC包下,已经提供了线程池的具体的实现:ThreadPoolExecutor。ThreadPoolExecutor提供了很多的构造方法,其中最复杂的构造方法有7个参数。
public ThreadPoolExecutor(int corePoolSize, int maximumPoolSize,
long keepAliveTime,
TimeUnit unit,
BlockingQueue<Runnable> workQueue,
ThreadFactory threadFactory,
RejectedExecutionHandler handler) {
}
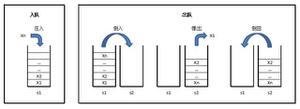
corePoolSize:该参数表示的是线程池的核心线程数。当任务提交到线程池时,如果线程池的线程数量还没有达到corePoolSize,那么就会新创建的一个线程来执行任务,如果达到了,就将任务添加到任务队列中。maximumPoolSize:该参数表示的是线程池中允许存在的最大线程数量。当任务队列满了以后,再有新的任务进入到线程池时,会判断再新建一个线程是否会超过maximumPoolSize,如果会超过,则不创建线程,而是执行拒绝策略。如果不会超过maximumPoolSize,则会创建新的线程来执行任务。keepAliveTime:当线程池中的线程数量大于corePoolSize时,那么大于corePoolSize这部分的线程,如果没有任务去处理,那么就表示它们是空闲的,这个时候是不允许它们一直存在的,而是允许它们最多空闲一段时间,这段时间就是keepAliveTime,时间的单位就是TimeUnit。unit:空闲线程允许存活时间的单位,TimeUnit是一个枚举值,它可以是纳秒、微妙、毫秒、秒、分、小时、天。workQueue:任务队列,用来存放任务。该队列的类型是阻塞队列,常用的阻塞队列有ArrayBlockingQueue、LinkedBlockingQueue、SynchronousQueue、PriorityBlockingQueue等。ArrayBlockingQueue是一个基于数组实现的阻塞队列,元素按照先进先出(FIFO)的顺序入队、出队。因为底层实现是数组,数组在初始化时必须指定大小,因此ArrayBlockingQueue是有界队列。LinkedBlockingQueue是一个基于链表实现的阻塞队列,元素按照先进先出(FIFO)的顺序入队、出队。因为顶层是链表,链表是基于节点之间的指针指向来维持前后关系的,如果不指链表的大小,它默认的大小是Integer.MAX_VALUE,即$2^{32}-1$,这个数值太大了,因此通常称LinkedBlockingQueue是一个无界队列。当然如果在初始化的时候,就指定链表大小,那么它就是有界队列了。SynchronousQueue是一个不存储元素的阻塞队列。每个插入操作必须得等到另一个线程调用了移除操作后,该线程才会返回,否则将一直阻塞。吞吐量通常要高于LinkedBlockingQueue。PriorityBlockingQueue是一个将元素按照优先级排序的阻塞的阻塞队列,元素的优先级越高,将会越先出队列。这是一个无界队列。threadFactory:线程池工厂,用来创建线程。通常在实际项目中,为了便于后期排查问题,在创建线程时需要为线程赋予一定的名称,通过线程池工厂,可以方便的为每一个创建的线程设置具有业务含义的名称。handler:拒绝策略。当任务队列已满,线程数量达到maximumPoolSize后,线程池就不会再接收新的任务了,这个时候就需要使用拒绝策略来决定最终是怎么处理这个任务。默认情况下使用AbortPolicy,表示无法处理新任务,直接抛出异常。在ThreadPoolExecutor类中定义了四个内部类,分别表示四种拒绝策略。我们也可以通过实现RejectExecutionHandler接口来实现自定义的拒绝策略。
AbortPocily:不再接收新任务,直接抛出异常。
CallerRunsPolicy:提交任务的线程自己处理。
DiscardPolicy:不处理,直接丢弃。
DiscardOldestPolicy:丢弃任务队列中排在最前面的任务,并执行当前任务。(排在队列最前面的任务并不一定是在队列中待的时间最长的任务,因为有可能是按照优先级排序的队列)
在使用ThreadPoolExecutor时,可以使用execute(Runnable task)方法向线程池中提交一个任务,没有返回值。也可以使用submit()方法向线程池中添加任务,有返回值,返回值对象是Future。submit()方法有三个重载的方法。
submit(Runnable task),该方法虽然返回值对象是Future,但是使用Future.get()获取结果是null。submit(Runnable task,T result),方法的返回值对象是Future,通过Future.get()获取具体的返回值时,结果与方法的第二个参数result相等。submit(Callable task),该方法的参数是一个Callable类型的对象,方法有返回值。- 关于Future的原理有兴趣的朋友可以自己先了解下,后面一篇文章会专门介绍。
源码分析
了解了ThreadPoolExecutor的基本用法,下面将结合源码来分析下线程池的代码实现。从上面的线程池的原理中,我们可以发现,线程池的原理相对比较简单,代码实现起来应该不难,看源码主要是为了学习他人写的优秀代码,尤其是编程大师Doug Lea写的代码。
对于一个线程池,除了上面介绍的几个重要属性以外,我们还需要一个变量来表示线程池状态,线程池也需要有运行中、关闭中、已关闭等状态。如果要我们去实现一个线程池,可能第一反应就是用一个单独的变量来表示线程池的状态,再用另一个变量来表示线程池中线程的数量。这样的确可以,不过Doug Lea并不是这样实现的,他将两者用一个变量来表示(不得不感叹下,大佬就是大佬,想法果然和他人不一样)。那么问题来了,如何用一个变量来表示两个值?阅读过读写锁源码的朋友可能就能立想到另外这一中方案(关于读写锁的介绍可以阅读这一篇文章: 读写锁ReadWriteLock的实现原理)。在读写锁的实现中将一个int型的数值,按照高低位来拆分,高位表示一个数,低位再表示另一个数,在线程池的实现中,Doug Lea再次使用了按位拆分的技巧。
在线程池中,使用了一个原子类AtomicInteger的变量来表示线程池状态和线程数量,该变量在内存中会占用4个字节,也就是32bit,其中高3位用来表示线程池的状态,低29位用来表示线程的数量。线程池的状态一共有5中状态,用3bit最多可以表示8种状态,因此采用高3位来表示线程池的状态完全能满足需求。示意图如下。
在看线程池的核心实现逻辑之前,先简单看下ThreadPoolExecutor中关于各种变量和方法的定义。因为在核心逻辑中,经常会用到它们,而且这些方法和变量大量用到了位运算,看起来不是特别直观,所以提前熟悉它们的功能对于看核心逻辑有很大的帮助。相关源码和注释如下。
// 高2位表示线程池的状态,其他29位表示线程的数量,即worker的数量private final AtomicInteger ctl = new AtomicInteger(ctlOf(RUNNING, 0));
// 计数的位数,29
private static final int COUNT_BITS = Integer.SIZE - 3;
// 线程池的最大大小,2^29 -1,
private static final int CAPACITY = (1 << COUNT_BITS) - 1;
// runState is stored in the high-order bits
// 线程池的状态,高三位表示线程的运行状态,
// RUNNING: 111
private static final int RUNNING = -1 << COUNT_BITS;
// SHUTDOWN: 000
private static final int SHUTDOWN = 0 << COUNT_BITS;
// STOP: 001
private static final int STOP = 1 << COUNT_BITS;
// TIFYING(整理): 010
private static final int TIDYING = 2 << COUNT_BITS;
// TERMINATED: 011
private static final int TERMINATED = 3 << COUNT_BITS;
// Packing and unpacking ctl
// 计算线程池的状态,计算结果的低29位全为0,因此最终结果就是线程池的状态
private static int runStateOf(int c) { return c & ~CAPACITY; }
// 工作线程的数量,计算结果的高3位全是0,因此最终结果就是工作线程的数量
private static int workerCountOf(int c) { return c & CAPACITY; }
// 根据线程池的状态和工作线程的数量,计算ctl,实际上就是将两者合并成ctl
private static int ctlOf(int rs, int wc) { return rs | wc; }
/*
* Bit field accessors that don"t require unpacking ctl.
* These depend on the bit layout and on workerCount being never negative.
*/
// 线程池的状态是否小于s
private static boolean runStateLessThan(int c, int s) {
return c < s;
}
// 线程池的状态大于等于s
private static boolean runStateAtLeast(int c, int s) {
return c >= s;
}
// 判断线程池是否处于运行状态
private static boolean isRunning(int c) {
return c < SHUTDOWN;
}
有了前面的基础,接下来分析下核心实现。再使用线程池时我们可以通过execute(Runnable task)来提交一个任务到线程池,因此我们从核心入口execute(Runnable task)方法开始分析。execute()方法的源码如下。在源码中我添加了部分注释,以供参考。
public void execute(Runnable command) { if (command == null)
throw new NullPointerException();
int c = ctl.get();
// workerCountOf(c)方法时计算工作线程的数量,
// 1. 工作线程数是否小于核心线程数,如果小于核心线程数,就创建新的线程去执行任务
if (workerCountOf(c) < corePoolSize) {
if (addWorker(command, true))
return;
// 任务执行失败后,重新获取ctl的值,供下面的逻辑计算
c = ctl.get();
}
// 2. 当工作线程数大于等于核心线程数时,线程池是运行状态,且任务添加到队列成功
if (isRunning(c) && workQueue.offer(command)) {
int recheck = ctl.get();
// 如果线程池状态不是RUNNING状态,就执行拒绝策略
if (! isRunning(recheck) && remove(command))
reject(command);
// 如果线程池中线程的数量为0,就调用addWorker()方法创建新的worker线程
else if (workerCountOf(recheck) == 0)
addWorker(null, false);
}
// 3. 线程池非运行状态,或者任务入队失败,就尝试创建新的worker线程
else if (!addWorker(command, false))
// 4. 如果创建新的worker线程失败,就执行拒绝策略。
reject(command);
}
execute()方法的逻辑大致分为4部分,分别对应线程池原理部分所提到的4个步骤。
- 先通过
workerCountOf(c)方法计算当前线程池中线程的数量,然后与初始化线程池时指定的核心线程数相比较,如果小于核心线程数,就调用addWorker()方法,实际上就是创建新的线程来执行任务。addWorker()方法的源码后面分析。 - 如果当前线程数大于等于核心线程数,那么就通过
workQueue.off(command)方法,将任务添加到任务队列中。如果此时任务队列还没有满,那么就会添加成功,workQueue.off(command)就会返回true,那么就会进入到if逻辑块中,进行一些其他的判断。如果此时任务队列已经满了,workQueue.off(command)方法就会返回false,那么就会执行后面的3和4。 - 当任务队列满了以后,就会再次调用
addWorker()方法,在addworker()方法中会在创建新的线程之前,判断线程数会不会超过最大线程数,如果会,addworker()就会返回false。如果不会,就会创建新的线程去执行任务。 - 如果addWorker()返回true,表示不能再创建新的线程了,那么此时就会执行到4,即调用reject()方法,执行拒绝策略。reject()方法的逻辑比较简单,就是调用了我们指定的
handler的rejectedExecution()方法。其源码如下。
final void reject(Runnable command) { handler.rejectedExecution(command, this);
}
从上面的分析中,可以看出,在好几处逻辑中均调用了addWorker()方法,这说明该方法十分重要。事实也是如此,该方法不仅重要,代码实现还十分复杂。该方法需要两个参数,第一个参数就是我们传入的Runnable任务,第二参数是一个boolean值,传入true表示的是当前线程池中的线程数还没有达到核心线程数,传false表示当前线程数已经大于等于核心线程数了。addWorker()方法的源码很长,这里我将其分为两个部分,下面先看前面一部分的源码。
private boolean addWorker(Runnable firstTask, boolean core) { retry:
for (;;) {
int c = ctl.get();
int rs = runStateOf(c);
// Check if queue empty only if necessary.
// 1. 当线程池的状态大于SHUTDOWN时,返回false。因为线程池处于关闭状态了,就不能再接受任务了
// 2. 当线程池的状态等于SHUTDOWN时,firstTask不为空或者任务队列为空,返回false
if (rs >= SHUTDOWN &&
! (rs == SHUTDOWN &&
firstTask == null &&
! workQueue.isEmpty()))
return false;
for (;;) {
int wc = workerCountOf(c);
// 1. 线程数大于等于理论上的最大数(2^29-1),则直接返回false。(因为线程数不能再增加了)
// 2. 根据core来决定线程数应该和谁比较。当线程数大于核心线程数或者最大线程数时,直接返回false。
// (因为当大于核心线程数时,表示此时任务应该直接添加到队列中(如果队列满了,可能入队失败);当大于最大线程数时,肯定不能再新创建线程了,不然设置最大线程数有毛用)
if (wc >= CAPACITY ||
wc >= (core ? corePoolSize : maximumPoolSize))
return false;
// 线程数+1,如果设置成功,就跳出外层循环
if (compareAndIncrementWorkerCount(c))
break retry;
// 再次获取线程池的状态,并将其与前面获取到的值比较,
// 如果相同,说明线程池的状态没有发生变化,继续在内循环中进行循环
// 如果不相同,说明在这期间,线程池的状态发生了变化,需要跳到外层循环,然后再重新进行循环
c = ctl.get(); // Re-read ctl
if (runStateOf(c) != rs)
continue retry;
// else CAS failed due to workerCount change; retry inner loop
}
}
// 省略后半部分代码
// ......
}
在这部分代码中,我们可以看到一个很陌生的语法:retry...break retry...continue retry。这种写法真的是太少见了,少见到我第一眼看到的时候,以为是我不小心碰到键盘,把源码给改了。这种语法有点类似于C语言里面的goto(已经被遗弃),其作用就是在for循环之前定义一个retry,然后在循环中,使用break retry时,就会让代码跳出循环,并不再进入循环;当使用continue retry时,表示跳出当前循环,立马进入到下一次循环。由于这里使用了两层for循环,因此为了方便在内层循环中一下子跳出到外层循环,就使用了retry这种语法。需要说明的是,这里的retry并不是Java里面的关键字,而是随机定义的一个字符串,我们也可以写成a,b,c等,但是后面的break和continue后面的字符串需要和前面定义的这个字符串对应。
我们可以看到,前半部分的核心逻辑就是使用了两个无限for和一个CAS操作来设置线程池的线程数量。如果线程池的线程数修改成功,就中断循环,进入后半部分代码的逻辑,如果修改失败,就利用for循环再一次进行修改,这样的好处是,既实现了线程安全,也避免使用锁,提高了效率。在这一部分代码中,进行了很多判断,这些判断主要是校验线程池的状态以及线程数,个人认为不是特别重要,我们主要抓住核心逻辑即可。
当成功修改线程数量以后,就会执行addWorker()方法的后半部分代码,其源码如下。
private boolean addWorker(Runnable firstTask, boolean core) { // 省略前半部分代码
// ......
boolean workerStarted = false;
boolean workerAdded = false;
Worker w = null;
try {
// 创建一个新的worker线程
w = new Worker(firstTask);
final Thread t = w.thread;
if (t != null) {
final ReentrantLock mainLock = this.mainLock;
mainLock.lock();
try {
// Recheck while holding lock.
// Back out on ThreadFactory failure or if
// shut down before lock acquired.
// 再次获取线程池的状态,因为在获取锁期间,线程池的状态可能改变了
int rs = runStateOf(ctl.get());
// 如果线程池状态时运行状态或者是关闭状态但是firstTask是空,就将worker线程添加到线程池
if (rs < SHUTDOWN ||
(rs == SHUTDOWN && firstTask == null)) {
// 判断worker线程是否已经启动了,如果已经启动,就抛出异常
// 个人觉得这一步没有任何意义,因为worker线程是刚new出来的,没有在任何地方启动
if (t.isAlive()) // precheck that t is startable
throw new IllegalThreadStateException();
workers.add(w);
int s = workers.size();
if (s > largestPoolSize)
largestPoolSize = s;
workerAdded = true;
}
} finally {
mainLock.unlock();
}
// 启动线程
if (workerAdded) {
t.start();
workerStarted = true;
}
}
} finally {
// 如果启动失败,就将worker线程从线程池移除,并将线程数减1
if (! workerStarted)
addWorkerFailed(w);
}
return workerStarted;
}
在这一部分代码中,通过new Worker(firstTask)创建了一个Worker对象,Worker对象继承了AQS,同时实现了Runnable接口,它是线程池中真正干活的人。我们提交到线程的任务,最终都是封装成Worker对象,然后由Worker对象来完成任务。先简单看下Woker的构造方法,其源码如下。在构造方法中,首先设置了同步变量state为-1,然后通过ThreadFactory创建了一个线程,注意在通过ThreadFactory创建线程时,将Worker自身也就是this,传入了进去,也就是说最后创建出来的线程对象,它里面的target属性就是指向这个Worker对象。
private final class Worker extends AbstractQueuedSynchronizer
implements Runnable{
/** Thread this worker is running in. Null if factory fails. */
final Thread thread;
/** Initial task to run. Possibly null. */
Runnable firstTask;
/** Per-thread task counter */
volatile long completedTasks;
/**
* Creates with given first task and thread from ThreadFactory.
* @param firstTask the first task (null if none)
*/
Worker(Runnable firstTask) {
setState(-1); // inhibit interrupts until runWorker
this.firstTask = firstTask;
// 将this传入进去,最后就是使线程的target属性等于当前的worker对象
this.thread = getThreadFactory().newThread(this);
}
}
当通过new Worker(firstTask)创建完worker对象后,此时线程已经被创建好了,在启动线程之前,先通过t.isAlive()判断线程是已经启动,如果没有启动,才会调用线程的start()方法来启动线程。这里有一点需要注意的是,创建完worker对象后,调用了mainLock.lock()来保证线程安全,因为这一步workers.add(w)存在并发的可能,所以需要通过获取锁来保证线程安全。
当调用线程的start()方法之后,如果线程获取到CPU的执行权,那么就会执行线程的run()方法,在线程的run()方法中,会执行线程中target属性的run()方法。这里线程的target属性就是我们创建的worker对象,因此最终会执行到Worker的run()方法。
private final class Worker extends AbstractQueuedSynchronizer
implements Runnable{
public void run() {
runWorker(this);
}
}
在Worker类的run()中,直接调用了runWorker()方法。所以Worker执行任务的核心逻辑就是在runWorker()方法中实现的。其源码如下。
final void runWorker(Worker w) { Thread wt = Thread.currentThread();
Runnable task = w.firstTask;
w.firstTask = null;
w.unlock(); // allow interrupts
boolean completedAbruptly = true;
try {
// 如果worker线程的firstTask不为空或者能从任务队列中获取到任务,就执行
// 否则就会一直阻塞到getTask()方法处
while (task != null || (task = getTask()) != null) {
// 保证worker串行的执行线程
w.lock();
// If pool is stopping, ensure thread is interrupted;
// if not, ensure thread is not interrupted. This
// requires a recheck in second case to deal with
// shutdownNow race while clearing interrupt
if ((runStateAtLeast(ctl.get(), STOP) ||
(Thread.interrupted() &&
runStateAtLeast(ctl.get(), STOP))) &&
!wt.isInterrupted())
wt.interrupt();
try {
// beforeExecute()是空方法,由子类具体实现
// 该方法的目的是为了让任务执行前做一些其他操作
beforeExecute(wt, task);
Throwable thrown = null;
try {
// 真正执行任务
task.run();
} catch (RuntimeException x) {
thrown = x; throw x;
} catch (Error x) {
thrown = x; throw x;
} catch (Throwable x) {
thrown = x; throw new Error(x);
} finally {
// afterExecute()空方法,由子类具体实现
// 该方法的目的是为了让任务执行后做一些其他操作
afterExecute(task, thrown);
}
} finally {
task = null;
w.completedTasks++;
w.unlock();
}
}
completedAbruptly = false;
} finally {
processWorkerExit(w, completedAbruptly);
}
}
runWorker()的源码看起来也比较长,但核心逻辑就一行,即:task.run(),最终执行了我们提交的Runnable任务。在runWorker()方法中通过一个while循环来让Worker对象一直来执行任务。当传入的task对象不为空或者通过getTask()方法能从任务队列中获取到任务时,worker就会一直执行。否则将在finally语句块中调用processWorkerExit退出,让线程中断,最终销毁。
getTask()方法是一个阻塞的方法,当能从任务队列中获取到任务时,就会立即返回一个任务。如果获取不到任务,就会阻塞。它支持超时,当超过线程池初始化时指定的线程最大存活时间后,就会返回null,从而导致worker线程退出while循环,最终线程销毁。
到这儿线程池的execute()方法就分析完了。最后简单分析下线程池的shutdown()方法和shutdownNow()方法。当调用shutdown()方法时,会令线程池的状态为SHUTDOWN,然后中断空闲的线程,对于已经在执行任务的线程并不会中断。当调用shutdownNow()方法时,会令线程池的状态为STOP,然后在中断所有的线程,包括正在执行任务的线程。
- shutdown()方法的源码如下。
public void shutdown() { final ReentrantLock mainLock = this.mainLock;
mainLock.lock();
try {
// 权限校验
checkShutdownAccess();
// 将线程池的状态设置为SHUTDOWN状态
advanceRunState(SHUTDOWN);
// 中断空闲的worker线程
interruptIdleWorkers();
// 空方法,由子类具体去实现,例如ScheduledThreadPoolExecutor
onShutdown(); // hook for ScheduledThreadPoolExecutor
} finally {
mainLock.unlock();
}
// 尝试将线程池的状态设置为TERMINATED
tryTerminate();
}
- shutdownNow()方法的源码如下。
public List<Runnable> shutdownNow() { List<Runnable> tasks;
final ReentrantLock mainLock = this.mainLock;
mainLock.lock();
try {
checkShutdownAccess();
// 线程池状态设置为STOP
advanceRunState(STOP);
// 中断所有线程,包括正在执行任务的线程
interruptWorkers();
// 清除任务队列中的所有任务
tasks = drainQueue();
} finally {
mainLock.unlock();
}
tryTerminate();
return tasks;
}
- 在实际工作当中,对于究竟应该使用哪一种方法去中断线程池,应该结合具体的任务来决定,如果
要求任务必须执行完成,那么就是用shutdown()方法。通常也建议使用shutdown()方法,更加优雅。
总结
- 本文主要介绍了线程池的实现原理,其原理主要分为4个核心步骤,先判断线程数量是否超过核心线程数,然后再判断任务队列是否已经满了,再判断线程数会不会超过设置的最大线程数,最后执行拒绝策略。接着本文详细介绍了线程池的几个核心参数
corePoolSize,maximumPoolSize,keepAliveTime,unit,workQueue,threadFactory,handler以及它们的各自的意义,然后结合源码实现,详细分析了任务的执行过程。 - 无论是读写锁的实现,还是线程池的实现,Doug Lea都使用了将一个int型的变量按照高低位拆分的技巧,这种思想很值得学习,不仅是因为设计巧妙,还因为在计算机中位运算的执行效率更高。
- 最后解释下关于文章开头提到的一点疑惑:为什么是先判断任务队列有没有满,再判断线程数有没有超过最大线程数?而不是先判断最大线程数,再判断任务队列是否已满?
- 答案和具体的源码实现有关。因为当需要创建线程的时候,都会调用
addWorker()方法,在addWorker()的后半部分的逻辑中,会调用mainLock.lock()方法来获取全局锁,而获取锁就会造成一定的资源争抢。如果先判断最大线程数,再判断任务队列是否已满,这样就会造成线程池原理的4个步骤中,第1步判断核心线程数时要获取全局锁,第2步判断最大线程数时,又要获取全局锁,这样相比于先判断任务队列是否已满,再判断最大线程数,就可能会多出一次获取全局锁的过程。因此在设计线程池,为了尽可能的避免因为获取全局锁而造成资源的争抢,所以会先判断任务队列是否已满,再判断最大线程数。 - 另外一个疑惑就是:
LinkedBlockingQueue的吞吐量比ArrayBlockingQueue的吞吐量要高。前者是基于链表实现的,后者是基于数组实现的,正常情况下,不应该是数组的性能要高于链表吗? - 然后看了一下这两个阻塞队列的源码才发现,这是因为LinkedBlockingQueue的
读和写操作使用了两个锁,takeLock和putLock,读写操作不会造成资源的争抢。而ArrayBlockingQueue的读和写使用的是同一把锁,读写操作存在锁的竞争。因此LinkedBlockingQueue的吞吐量高于ArrayBlockingQueue。
推荐
- 管程:并发编程的基石
- 初识CAS的实现原理
- Unsafe类的源码解读以及使用场景
- 队列同步器(AQS)的设计原理
- 队列同步器(AQS)源码分析
- 可重入锁(ReentrantLock)源码分析
- 公平锁与非公平锁的对比
- Condition源码分析
- 读写锁ReadWriteLock的实现原理
- Semaphore的源码分析以及使用场景
- 并发工具类CountDownLatch的源码分析以及使用场景
- 并发工具类CyclicBarrier的源码分析以及使用场景
- wait()和notify()一定成对出现吗?如何解释Thread.join()
以上是 面试官:来!聊聊线程池的实现原理以及使用时的问题 的全部内容, 来源链接: utcz.com/z/511093.html