OPENCV去除小连通区域,去除孔洞的实例讲解
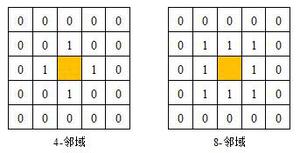
一、对于二值图,0代表黑色,255代表白色。去除小连通区域与孔洞,小连通区域用8邻域,孔洞用4邻域。
函数名字为:void RemoveSmallRegion(Mat &Src, Mat &Dst,int AreaLimit, int CheckMode, int NeihborMode)
CheckMode: 0代表去除黑区域,1代表去除白区域; NeihborMode:0代表4邻域,1代表8邻域;
如果去除小连通区域CheckMode=1,NeihborMode=1去除孔洞CheckMode=0,NeihborMode=0
记录每个像素点检验状态的标签,0代表未检查,1代表正在检查,2代表检查不合格(需要反转颜色),3代表检查合格或不需检查 。
1.先对整个图像扫描,如果是去除小连通区域,则将黑色的背景图作为合格,像素值标记为3,如果是去除孔洞,则将白色的色素点作为合格,像素值标记为3。
2.扫面整个图像,对图像进行处理。
void RemoveSmallRegion(Mat &Src, Mat &Dst,int AreaLimit, int CheckMode, int NeihborMode)
{
int RemoveCount = 0;
//新建一幅标签图像初始化为0像素点,为了记录每个像素点检验状态的标签,0代表未检查,1代表正在检查,2代表检查不合格(需要反转颜色),3代表检查合格或不需检查
//初始化的图像全部为0,未检查
Mat PointLabel = Mat::zeros(Src.size(), CV_8UC1);
if (CheckMode == 1)//去除小连通区域的白色点
{
cout << "去除小连通域.";
for (int i = 0; i < Src.rows; i++)
{
for (int j = 0; j < Src.cols; j++)
{
if (Src.at<uchar>(i, j) < 10)
{
PointLabel.at<uchar>(i, j) = 3;//将背景黑色点标记为合格,像素为3
}
}
}
}
else//去除孔洞,黑色点像素
{
cout << "去除孔洞";
for (int i = 0; i < Src.rows; i++)
{
for (int j = 0; j < Src.cols; j++)
{
if (Src.at<uchar>(i, j) > 10)
{
PointLabel.at<uchar>(i, j) = 3;//如果原图是白色区域,标记为合格,像素为3
}
}
}
}
vector<Point2i>NeihborPos;//将邻域压进容器
NeihborPos.push_back(Point2i(-1, 0));
NeihborPos.push_back(Point2i(1, 0));
NeihborPos.push_back(Point2i(0, -1));
NeihborPos.push_back(Point2i(0, 1));
if (NeihborMode == 1)
{
cout << "Neighbor mode: 8邻域." << endl;
NeihborPos.push_back(Point2i(-1, -1));
NeihborPos.push_back(Point2i(-1, 1));
NeihborPos.push_back(Point2i(1, -1));
NeihborPos.push_back(Point2i(1, 1));
}
else cout << "Neighbor mode: 4邻域." << endl;
int NeihborCount = 4 + 4 * NeihborMode;
int CurrX = 0, CurrY = 0;
//开始检测
for (int i = 0; i < Src.rows; i++)
{
for (int j = 0; j < Src.cols; j++)
{
if (PointLabel.at<uchar>(i, j) == 0)//标签图像像素点为0,表示还未检查的不合格点
{ //开始检查
vector<Point2i>GrowBuffer;//记录检查像素点的个数
GrowBuffer.push_back(Point2i(j, i));
PointLabel.at<uchar>(i, j) = 1;//标记为正在检查
int CheckResult = 0;
for (int z = 0; z < GrowBuffer.size(); z++)
{
for (int q = 0; q < NeihborCount; q++)
{
CurrX = GrowBuffer.at(z).x + NeihborPos.at(q).x;
CurrY = GrowBuffer.at(z).y + NeihborPos.at(q).y;
if (CurrX >= 0 && CurrX<Src.cols&&CurrY >= 0 && CurrY<Src.rows) //防止越界
{
if (PointLabel.at<uchar>(CurrY, CurrX) == 0)
{
GrowBuffer.push_back(Point2i(CurrX, CurrY)); //邻域点加入buffer
PointLabel.at<uchar>(CurrY, CurrX) = 1; //更新邻域点的检查标签,避免重复检查
}
}
}
}
if (GrowBuffer.size()>AreaLimit) //判断结果(是否超出限定的大小),1为未超出,2为超出
CheckResult = 2;
else
{
CheckResult = 1;
RemoveCount++;//记录有多少区域被去除
}
for (int z = 0; z < GrowBuffer.size(); z++)
{
CurrX = GrowBuffer.at(z).x;
CurrY = GrowBuffer.at(z).y;
PointLabel.at<uchar>(CurrY,CurrX)+=CheckResult;//标记不合格的像素点,像素值为2
}
//********结束该点处的检查**********
}
}
}
CheckMode = 255 * (1 - CheckMode);
//开始反转面积过小的区域
for (int i = 0; i < Src.rows; ++i)
{
for (int j = 0; j < Src.cols; ++j)
{
if (PointLabel.at<uchar>(i,j)==2)
{
Dst.at<uchar>(i, j) = CheckMode;
}
else if (PointLabel.at<uchar>(i, j) == 3)
{
Dst.at<uchar>(i, j) = Src.at<uchar>(i, j);
}
}
}
cout << RemoveCount << " objects removed." << endl;
}
调用函数:dst是原来的二值图。
Mat erzhi1 = Mat::zeros(srcImage.rows, srcImage.cols, CV_8UC1);
RemoveSmallRegion(dst, erzhi,100, 1, 1);
RemoveSmallRegion(erzhi, erzhi,100, 0, 0);
imshow("erzhi1", erzhi);
和之前的图像相比
以上这篇OPENCV去除小连通区域,去除孔洞的实例讲解就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持。
以上是 OPENCV去除小连通区域,去除孔洞的实例讲解 的全部内容, 来源链接: utcz.com/z/349684.html