基于opencv的行人检测(支持图片视频)
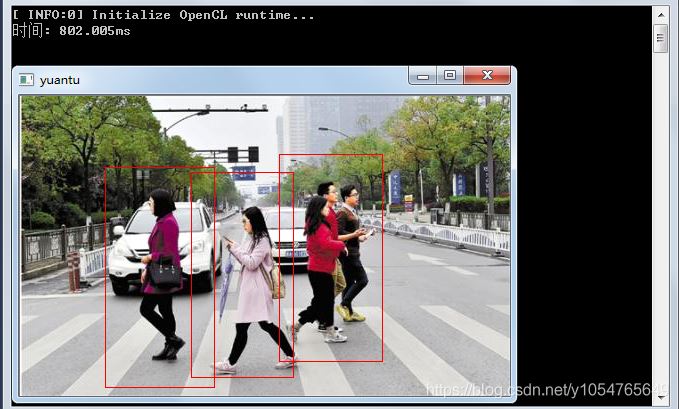
基于方向梯度直方图(HOG)/线性支持向量机(SVM)算法的行人检测方法中存在检测速度慢的问题,如下图所示,对一张400*490像素的图片进行检测要接近800毫秒,所以hog+svm的方法放在视频中进行行人检测时,每秒只能检测1帧图片,1帧/s根本不能达到视频播放的流畅性。
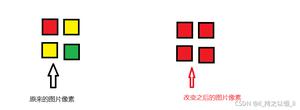
本文采用先从视频每帧的图像中提取出物体的轮廓(也可以对前后两针图片做差,只对有变化的部分进行检测,其目的一样,都是减少运算的面积),再对每个轮廓进行HOG+SVM检测,判断是否为行人。可以大大的缩减HOG+SVM的面积,经实测,检测速度可以达到10帧/S,可以勉强达到视频流畅的要求。
轮廓的提取用的是cv::findContours的API,感兴趣的可以自己去查看相关资料
首先介绍下方向梯度直方图。
在图像或者视频帧中,边缘方向密度分布可以很好地描述局部目标的形状和表象,也就是说通过 HOG特征,可以有效地将人体和复杂背景区分出来。对于行人检测中 HOG 特征提取的具体实现方法是: 将视频中的每一帧通过滑动窗口切割成很小的区域( Cell) ,通过计算每个区域面的方向梯度特征,得到每个区域的方向特征直方图,小区域再组成更大的区域,通过将区域的方向梯度特征组合起来并在块单元中进行归一化处理,就形成了一个 Block 内 HOG 描述子,遍历搜索所有的方向特征从而最终构成一个帧的 HOG 描述特征向量。算法的过程[3]分为:
①将一个视频的每一帧进行灰度化处理。把视频的每一帧彩色空间变成灰度空间,因为 HOG 中不需要彩色信息的帮助。
②对输入的视频的每一帧进行颜色空间的归一化。由于视频中人信息的复杂性,背影的灰暗程度以及光照的影响都对检测器的鲁棒性有一定的影响,归一化可以很大程度上降低这些的影响。这 里 使 用gamma 校正: 对像素值求其平方根( 降低数值大小) 。
③计算像素梯度。这是 HOG 特征检测中最重要的一个环节,通过像素的梯度方向直方图来描述像素的特征。特别注意的是我们不需要做平滑处理,因为平滑处理的本质就是迷糊图像,降低了像素边缘信息,因而就不能很好地提取边缘信息来表达特征。
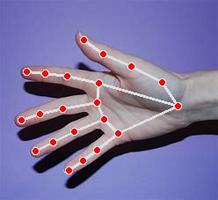
④将图像划分成小 cell。这一步我们需要为计算梯度,建立梯度方向直方图定义一个载体,因此这里把图像分割成很小的区域,这里称为细胞单元,实验表明6 × 6 像素的细胞单元效果最佳。接着采用 9 个直方图来统计一个细胞单元里面的特征信息。360°不考虑
正负方向,把方向分成 9 份,如图 1 所示,称为 bin,也就是每一个 bin 对应 20°,这样就把梯度方向映射到直方图里面,9 个方向特征向量代表 9 个 bin,增幅就代表每一个 bin 的权值。
⑤统计每个 cell 的梯度直方图即可形成每个 cell的 descriptor。
⑥将每几个 cell 组成一个 block,一个 block 内所有 cell 的特征串联起来,便得到该 block 的 HOG 特征descriptor。
⑦将图像内所有 block 的 HOG 特征收集起来就可得到该图像特征向量。
支持向量机
支持向量机( Support Vector Machine) 就是风险降低到最小程度上,寻找最优的解决方案。视频检测特征分类中,就是针对低维空间的线性不可分问题,通过核函数映射到高维空间达到线性可分,再进行线性分割实现特征分类。
SVM 具有以下几个特点:
( 1) 小样本。
( 2) 非 线 性 问 题。即针对线性的不可分问题,SVM 通过松弛变量以及核函数进行解决。
( 3) 高维模式识别。在某些样本,例如密集型特征,可以达到几万甚至十几万的维数,如果不对样本进行降维,SVM 也能够找出支持向量样本,对这些特征训练出优秀的分类器。
视频检测代码:
void video_test() {
void display(Mat, vector<Rect>&);
//void Crop_picture();
//void train();
//void save_hard_example();
//Crop_picture(); //裁切负样本图片,每张负样本图片随机裁成10张
//train(); //训练正负样本
//save_hardexample() //根据正负样本得到的检测子,对INRIAPerson/Train/neg/中的图片进行测试,并将错检的样本保存
//train(); //训练正负样本及难例样本
//加载svm分类器的系数
HOGDescriptor hog; string str;
vector<float> detector;
/*ifstream fin("HOGDetectorForOpenCV.txt");
while (getline(fin, str))
{
detector.push_back(stringToNum<float>(str));
}
*/
vector<Rect> people;
VideoCapture capture(VideotestPath);
/*if (!capture.isOpened())
return -1;*/
Mat frame, foreground;
int num = 0;
Ptr<BackgroundSubtractorMOG2> mod = createBackgroundSubtractorMOG2();
while (true)
{
vector<Rect> rect6;
if (!capture.read(frame))
break;
mod->apply(frame, foreground, 0.01);
hog.setSVMDetector(HOGDescriptor::getDefaultPeopleDetector());
//hog.setSVMDetector(detector);
vector<Rect> rect5;
display(foreground, rect5);
vector<Rect> ret = rect5;
for (auto i = 0; i != ret.size(); i++)
{
Mat a = frame;
if (ret[i].x > 50 && ret[i].y > 50 && ret[i].x + ret[i].width <670 && ret[i].y + ret[i].height < 520)
{
ret[i].x = ret[i].x - 50;
ret[i].y = ret[i].y - 50; ret[i].width = ret[i].width + 100; ret[i].height = ret[i].height + 100;
}
Mat src(a(ret[i]));
cout << ret[i].x << " " << ret[i].y << " " << ret[i].width << " " << ret[i].height << endl;
// imshow("aa", src); waitKey(0);
// cv::namedWindow("src", CV_WINDOW_NORMAL);
if (ret[i].width >= 64 && ret[i].height >= 128)
hog.detectMultiScale(src, people, 0, Size(4, 4), Size(0, 0), 1.07, 2);
//cout << people.size()<<endl;
for (size_t j = 0; j < people.size(); j++)
{
people[j].x += ret[i].x; people[j].y += ret[i].y;
rect6.push_back(people[j]);
//rectangle(frame, people[j], cv::Scalar(0, 0, 255), 2);
}
//imshow(" ", frame); waitKey(0);
}
//因为多尺度检测得到的结果矩形框较大,按比例缩减矩形框
for (auto h = 0; h != rect6.size(); h++)
{
rect6[h].x += cvRound(rect6[h].width*0.1);
rect6[h].width = cvRound(rect6[h].width*0.8);
rect6[h].y += cvRound(rect6[h].height*0.07);
rect6[h].height = cvRound(rect6[h].height*0.8);
rectangle(frame, rect6[h], cv::Scalar(0, 0, 255), 1);
//rect2[h] = boundingRect(frame);
}
imshow(" ", frame); waitKey(1);
}
waitKey();
}
提取轮廓的代码:
void display(Mat gray_diff, vector<Rect>& rect)
{
//Mat res = src.clone();
vector<vector<Point>> cts; //定义轮廓数组
findContours(gray_diff, cts, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE); //查找轮廓,,模式为只检测外轮廓,并存储所有的轮廓点
//vector<Rect> rect; //定义矩形边框
for (int i = 0; i < cts.size(); i++)
{
if (contourArea(cts[i])>th_area) //计算轮廓的面积,排除小的干扰轮廓
//查找外部矩形边界
rect.push_back(boundingRect(cts[i])); //计算轮廓的垂直边界最小矩形
}
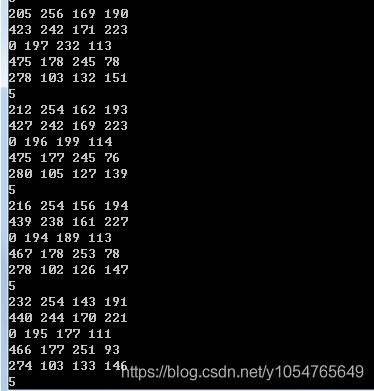
cout << rect.size() << endl; //输出轮廓个数
}
检测效果:

进行HOG+SVM的四个顶点像素坐标。可以看到每次运算的面积小了很多。
当然 ,是可以优化,比如每两帧图片检测一次,下一帧图片保持上一帧的检测结果。比如轮廓区域的面积怎么去合适的框起来,如何设定合适的阈值去滤掉小框,两个框重叠时,怎么去优化,减小进行运算的面积。本文只是给个思路,具体读者可以自己去实现。
贴下github 有兴趣的可以去读下 ,样本集用的INRIA行人检测数据集,训练过程就不详述了。
github:https://github.com/ttttthub/pedestrian-detection.git
到此这篇关于基于opencv的行人检测(支持图片视频)的文章就介绍到这了,更多相关opencv 行人检测内容请搜索以前的文章或继续浏览下面的相关文章希望大家以后多多支持!
以上是 基于opencv的行人检测(支持图片视频) 的全部内容, 来源链接: utcz.com/p/248025.html