Opencv光流运动物体追踪详解
光流的概念是由一个叫Gibson的哥们在1950年提出来的。它描述是空间运动物体在观察成像平面上的像素运动的瞬时速度,利用图像序列中像素在时间域上的变化以及相邻帧之间的相关性来找到上一帧跟当前帧之间存在的对应关系,从而计算出相邻帧之间物体的运动信息的一种方法。那么所说的光流到底是什么?
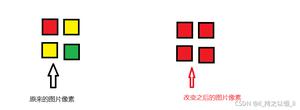
简单来说,上图表现的就是光流,光流描述的是图像上每个像素点的灰度的位置(速度)变化情况,光流的研究是利用图像序列中的像素强度数据的时域变化和相关性来确定各自像素位置的“运动”。研究光流场的目的就是为了从图片序列中近似得到不能直接得到的运动场。
光流法的前提假设:
(1)相邻帧之间的亮度恒定;
(2)相邻视频帧的取帧时间连续,或者,相邻帧之间物体的运动比较“微小”;
(3)保持空间一致性;即,同一子图像的像素点具有相同的运动;
Opencv中金字塔LK光流实现:
#include "highgui/highgui.hpp"
#include "opencv2/nonfree/nonfree.hpp"
#include "opencv2/video/tracking.hpp"
#include <iostream>
using namespace cv;
using namespace std;
Mat image1,image2;
vector<Point2f> point1,point2,pointCopy;
vector<uchar> status;
vector<float> err;
int main(int argc,char *argv[])
{
VideoCapture video(argv[1]);
double fps=video.get(CV_CAP_PROP_FPS); //获取视频帧率
double pauseTime=1000/fps; //两幅画面中间间隔
video>>image1;
Mat image1Gray,image2Gray;
cvtColor(image1,image1Gray,CV_RGB2GRAY);
goodFeaturesToTrack(image1Gray,point1,100,0.01,10,Mat());
pointCopy=point1;
for(int i=0;i<point1.size();i++) //绘制特征点位
{
circle(image1,point1[i],1,Scalar(0,0,255),2);
}
namedWindow("角点特征光流",0);
imshow("角点特征光流",image1);
while(true)
{
video>>image2;
if(!image2.data||waitKey(pauseTime)==27) //图像为空或Esc键按下退出播放
{
break;
}
cvtColor(image2,image2Gray,CV_RGB2GRAY);
calcOpticalFlowPyrLK(image1Gray,image2Gray,point1,point2,status,err,Size(20,20),3); //LK金字塔
for(int i=0;i<point2.size();i++)
{
circle(image2,point2[i],1,Scalar(0,0,255),2);
line(image2,pointCopy[i],point2[i],Scalar(255,0,0),2);
}
imshow("角点特征光流",image2);
swap(point1,point2);
image1Gray=image2Gray.clone();
}
return 0;
}
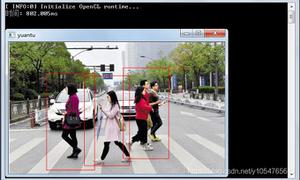
图像跟踪结果1:
图像跟踪结果2:
视频流跟踪:
以上是 Opencv光流运动物体追踪详解 的全部内容, 来源链接: utcz.com/z/319354.html