架构之微服务(etcd)
本文内容纲要:
- 1. ETCD是什么- 2. ETCD vs ZK
- 3. ETCD的使用场景
- 4. ETCD读写性能
- 5. ETCD工作原理
- 5.1 选主
- 5.2 日志复制
- 5.3 安全性
- 6. ETCD使用案例
- 7. ETCD接口
1. ETCD是什么
ETCD是用于共享配置和服务发现的分布式,一致性的KV存储系统。该项目目前最新稳定版本为2.3.0. 具体信息请参考[项目首页]和[Github]。ETCD是CoreOS公司发起的一个开源项目,授权协议为Apache。
提供配置共享和服务发现的系统比较多,其中最为大家熟知的是[Zookeeper](后文简称ZK),而ETCD可以算得上是后起之秀了。在项目实现,一致性协议易理解性,运维,安全等多个维度上,ETCD相比Zookeeper都占据优势。
2. ETCD vs ZK
本文选取ZK作为典型代表与ETCD进行比较,而不考虑[Consul]项目作为比较对象,原因为Consul的可靠性和稳定性还需要时间来验证(项目发起方自身服务并未使用Consul, 自己都不用)。
- 一致性协议: ETCD使用[Raft]协议, ZK使用ZAB(类PAXOS协议),前者容易理解,方便工程实现;
- 运维方面:ETCD方便运维,ZK难以运维;
- 项目活跃度:ETCD社区与开发活跃,ZK已经快死了;
- API:ETCD提供HTTP+JSON, gRPC接口,跨平台跨语言,ZK需要使用其客户端;
- 访问安全方面:ETCD支持HTTPS访问,ZK在这方面缺失;
3. ETCD的使用场景
和ZK类似,ETCD有很多使用场景,包括:
- 配置管理
- 服务注册于发现
- 选主
- 应用调度
- 分布式队列
- 分布式锁
4. ETCD读写性能
按照官网给出的[Benchmark], 在2CPU,1.8G内存,SSD磁盘这样的配置下,单节点的写性能可以达到16K QPS, 而先写后读也能达到12K QPS。这个性能还是相当可观的。
5. ETCD工作原理
ETCD使用Raft协议来维护集群内各个节点状态的一致性。简单说,ETCD集群是一个分布式系统,由多个节点相互通信构成整体对外服务,每个节点都存储了完整的数据,并且通过Raft协议保证每个节点维护的数据是一致的。
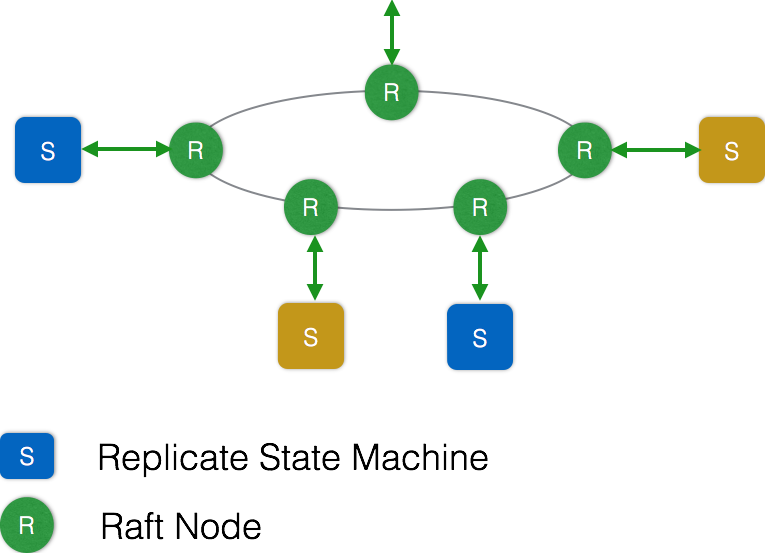
如图所示,每个ETCD节点都维护了一个状态机,并且,任意时刻至多存在一个有效的主节点。主节点处理所有来自客户端写操作,通过Raft协议保证写操作对状态机的改动会可靠的同步到其他节点。
ETCD工作原理核心部分在于Raft协议。本节接下来将简要介绍Raft协议,具体细节请参考其[论文]。
Raft协议正如论文所述,确实方便理解。主要分为三个部分:选主,日志复制,安全性。
5.1 选主
Raft协议是用于维护一组服务节点数据一致性的协议。这一组服务节点构成一个集群,并且有一个主节点来对外提供服务。当集群初始化,或者主节点挂掉后,面临一个选主问题。集群中每个节点,任意时刻处于Leader, Follower, Candidate这三个角色之一。选举特点如下:
当集群初始化时候,每个节点都是Follower角色;
集群中存在至多1个有效的主节点,通过心跳与其他节点同步数据;
当Follower在一定时间内没有收到来自主节点的心跳,会将自己角色改变为Candidate,并发起一次选主投票;当收到包括自己在内超过半数节点赞成后,选举成功;当收到票数不足半数选举失败,或者选举超时。若本轮未选出主节点,将进行下一轮选举(出现这种情况,是由于多个节点同时选举,所有节点均为获得过半选票)。
Candidate节点收到来自主节点的信息后,会立即终止选举过程,进入Follower角色。
为了避免陷入选主失败循环,每个节点未收到心跳发起选举的时间是一定范围内的随机值,这样能够避免2个节点同时发起选主。
5.2 日志复制
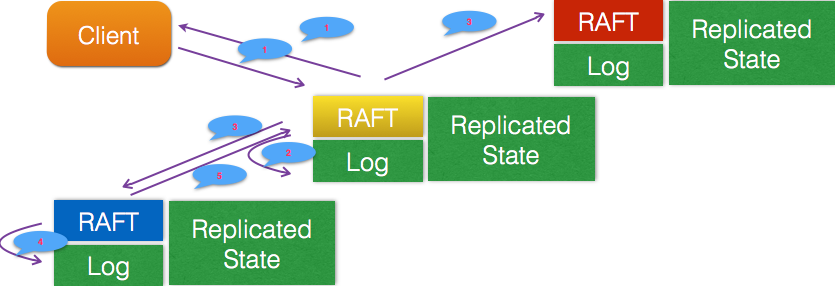
所谓日志复制,是指主节点将每次操作形成日志条目,并持久化到本地磁盘,然后通过网络IO发送给其他节点。其他节点根据日志的逻辑时钟(TERM)和日志编号(INDEX)来判断是否将该日志记录持久化到本地。当主节点收到包括自己在内超过半数节点成功返回,那么认为该日志是可提交的(committed),并将日志输入到状态机,将结果返回给客户端。
这里需要注意的是,每次选主都会形成一个唯一的TERM编号,相当于逻辑时钟。每一条日志都有全局唯一的编号。
主节点通过网络IO向其他节点追加日志。若某节点收到日志追加的消息,首先判断该日志的TERM是否过期,以及该日志条目的INDEX是否比当前以及提交的日志的INDEX跟早。若已过期,或者比提交的日志更早,那么就拒绝追加,并返回该节点当前的已提交的日志的编号。否则,将日志追加,并返回成功。
当主节点收到其他节点关于日志追加的回复后,若发现有拒绝,则根据该节点返回的已提交日志编号,发生其编号下一条日志。
主节点像其他节点同步日志,还作了拥塞控制。具体地说,主节点发现日志复制的目标节点拒绝了某次日志追加消息,将进入日志探测阶段,一条一条发送日志,直到目标节点接受日志,然后进入快速复制阶段,可进行批量日志追加。
按照日志复制的逻辑,我们可以看到,集群中慢节点不影响整个集群的性能。另外一个特点是,数据只从主节点复制到Follower节点,这样大大简化了逻辑流程。
5.3 安全性
截止此刻,选主以及日志复制并不能保证节点间数据一致。试想,当一个某个节点挂掉了,一段时间后再次重启,并当选为主节点。而在其挂掉这段时间内,集群若有超过半数节点存活,集群会正常工作,那么会有日志提交。这些提交的日志无法传递给挂掉的节点。当挂掉的节点再次当选主节点,它将缺失部分已提交的日志。在这样场景下,按Raft协议,它将自己日志复制给其他节点,会将集群已经提交的日志给覆盖掉。
这显然是不可接受的。
其他协议解决这个问题的办法是,新当选的主节点会询问其他节点,和自己数据对比,确定出集群已提交数据,然后将缺失的数据同步过来。这个方案有明显缺陷,增加了集群恢复服务的时间(集群在选举阶段不可服务),并且增加了协议的复杂度。
Raft解决的办法是,在选主逻辑中,对能够成为主的节点加以限制,确保选出的节点已定包含了集群已经提交的所有日志。如果新选出的主节点已经包含了集群所有提交的日志,那就不需要从和其他节点比对数据了。简化了流程,缩短了集群恢复服务的时间。
这里存在一个问题,加以这样限制之后,还能否选出主呢?答案是:只要仍然有超过半数节点存活,这样的主一定能够选出。因为已经提交的日志必然被集群中超过半数节点持久化,显然前一个主节点提交的最后一条日志也被集群中大部分节点持久化。当主节点挂掉后,集群中仍有大部分节点存活,那这存活的节点中一定存在一个节点包含了已经提交的日志了。
至此,关于Raft协议的简介就全部结束了。
6. ETCD使用案例
据公开资料显示,至少有CoreOS, Google Kubernetes, Cloud Foundry, 以及在Github上超过500个项目在使用ETCD。
7. ETCD接口
ETCD提供HTTP协议,在最新版本中支持Google gRPC方式访问。具体支持接口情况如下:
ETCD是一个高可靠的KV存储系统,支持PUT/GET/DELETE接口;
为了支持服务注册与发现,支持WATCH接口(通过http long poll实现);
支持KEY持有TTL属性;
CAS(compare and swap)操作;
支持多key的事务操作;
支持目录操作
点击链接加入群【.NET大型网站架构】433685124QQ群
本文内容总结:1. ETCD是什么,2. ETCD vs ZK,3. ETCD的使用场景,4. ETCD读写性能,5. ETCD工作原理,5.1 选主,5.2 日志复制,5.3 安全性,6. ETCD使用案例,7. ETCD接口,
原文链接:https://www.cnblogs.com/InCsharp/p/6810114.html
以上是 架构之微服务(etcd) 的全部内容, 来源链接: utcz.com/z/297011.html