OpenCV实现帧差法检测运动目标
今天的目标是用OpenCV实现对运动目标的检测,这里选用三帧帧差法。代码如下:
#include <opencv2/opencv.hpp>
#include <cv.h>
#include <highgui.h>
#include <stdio.h>
#include <ctype.h>
double Threshold_index=0;
const int CONTOUR_MAX_AERA = 200;
void trackbar(int pos)
{
Threshold_index=(double)pos;
}
int main(int argc, char* argv[])
{
CvCapture *capture=cvCaptureFromCAM(0);
int n_cnt=0;
IplImage *img=NULL,
*img_gray1=NULL,
*img_gray2=NULL,
*img_gray3=NULL,
*img_diff1=NULL,
*img_diff2=NULL,
*img_diff_and=NULL,
*img_binary=NULL,
*img_dilate=NULL;
CvMemStorage *stor;
CvSeq *cont;
stor=cvCreateMemStorage(0);
cont=cvCreateSeq(CV_SEQ_ELTYPE_POINT,sizeof(CvSeq),sizeof(CvPoint),stor);
cvNamedWindow("test",CV_WINDOW_AUTOSIZE);
cvNamedWindow("dilate",CV_WINDOW_AUTOSIZE);
img=cvQueryFrame(capture);
img_gray1=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,1);
img_gray2=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,1);
img_gray3=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,1);
img_diff1=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,1);
img_diff2=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,1);
img_diff_and=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,1);
img_binary=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,1);
img_dilate=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,1);
int index=1;
cvCreateTrackbar("Threshold","test",&index,255,trackbar);
while(img=cvQueryFrame(capture))
{
if(n_cnt%3==0)
cvCvtColor(img,img_gray1,CV_BGR2GRAY);
else if(n_cnt%3==1)
cvCvtColor(img,img_gray2,CV_BGR2GRAY);
else if(n_cnt%3==2)
cvCvtColor(img,img_gray3,CV_BGR2GRAY);
char c=(char)cvWaitKey(25);
if(c==27)
break;
if(n_cnt>3)
{
cvAbsDiff(img_gray1,img_gray2,img_diff1);
cvAbsDiff(img_gray2,img_gray3,img_diff2);
cvAnd(img_diff1,img_diff2,img_diff_and);
cvThreshold(img_diff_and,img_binary,Threshold_index,255,CV_THRESH_BINARY);
cvShowImage("test",img_binary);
cvDilate(img_binary,img_dilate);
//cvShowImage("dilate",img_dilate);
cvFindContours(img_dilate,stor,&cont,sizeof(CvContour),CV_RETR_LIST,CV_CHAIN_APPROX_SIMPLE,cvPoint(0,0));
for(;cont;cont = cont->h_next)
{
CvRect r = ((CvContour*)cont)->rect;//子类转换为父类例子
if(r.height * r.width > CONTOUR_MAX_AERA) // 面积小的方形抛弃掉
{
cvRectangle(img, cvPoint(r.x,r.y),
cvPoint(r.x + r.width, r.y + r.height),
CV_RGB(255,0,0), 1, CV_AA,0);
}
}
cvShowImage("dilate",img);
}
if(c=='s')
{
cvSaveImage("d:/img.bmp",img);
cvSaveImage("d:/img_binary.bmp",img_dilate);
}
n_cnt++;
}
cvDestroyAllWindows();
cvReleaseCapture(&capture);
cvReleaseImage(&img_gray1);
cvReleaseImage(&img_gray2);
cvReleaseImage(&img_gray3);
cvReleaseImage(&img_diff1);
cvReleaseImage(&img_diff2);
cvReleaseImage(&img_diff_and);
cvReleaseImage(&img_binary);
cvReleaseImage(&img_dilate);
cvReleaseMemStorage(&stor);
return 0;
}
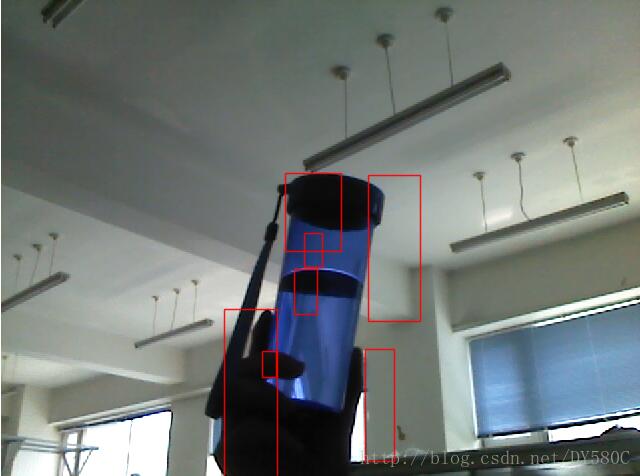
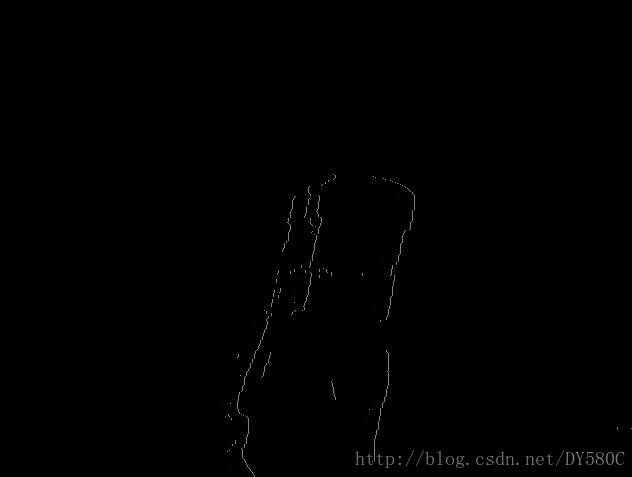
下图是检测的运动目标二值化图像以及在实际图像中叠加的矩形框效果图。
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持。
以上是 OpenCV实现帧差法检测运动目标 的全部内容, 来源链接: utcz.com/p/245035.html