ITD-拖影角度测量(DPC)
概述
介绍
图像传感器中的传感器上每一光线采集的点形成的阵列工艺存在缺陷,或光信号进行转化的过程中出现错误,会造成图像上有些像素的信息有误,导致图像中的像素值不准确,这些有缺陷的像素即为图像坏点(Bad pixel)。
由于来自不同工艺技术和传感器制造商,尤其对一些低成本、消费品的sensor来说,坏点数会有很多。此外,sensor在长时间、高温环境下坏点也会越来越多,从而破坏了图像的清晰度和完整性。
坏点校正(Defect Pixel Correction)即是解决此问题的方法,坏点的分类有以下几种:
静态坏点:
- 亮点:一般来说像素点的亮度值是正比于入射光的,而亮点的亮度值明显大于入射光乘以相应比例,并且随着曝光时间的增加,该点的亮度会显著增加;
- 暗点:无论在什么入射光下,该点的值接近于0;
动态坏点:在一定像素范围内,该点表现正常,而超过这一范围,该点表现的比周围像素要亮。与sensor 温度、增益有关,sensor 温度升高或者gain 值增大时,动态坏点会变的更加明显。
原因
如果图像中存在坏点的话,在进行插值和滤波处理的时候,会影响周围的像素点,因此需要在插值和滤波之前对坏点进行校正。
图像存在坏点比较多或动态坏点很多的情况下,会造成图像的边缘出现伪色彩的情况,这种现象不但影响图像的清晰度,而且会影响边缘的色彩。此外,坏点也会造成图像部分pixel闪烁的现象。
校正
这里给的校正方法是基于bayer图像,对于灰度图原理一致。
bayer格式的DPC方法,将图像分为R、G、B三幅图像,分别进行坏点校正。若sensor的图像格式为RGBIR,则需要将图像分为R、Gr、Gb、B四个通道。
动态坏点校正和静态坏点校正是两个相互独立的过程。
静态坏点校正
静态坏点的校正是基于已有的静态坏点表,比较当前点的坐标是否与静态坏点表中的某个坐标一致,若一致则判定为坏点,然后再计算校正结果对其进行校正。,每个sensor的坏点都不一样,需要sensor厂商给出每个sensor的静态坏点表,但是出于成本的考虑,很多sensor厂商并没有给出,而用户校正的话只能一个一个对其进行校正,因此对于一些低成本的sensor,静态坏点校正的实用性不是很强。
由于在硬件设计的时候需要占用大量的memory,考虑到芯片面积以及一些其他原因,因此静态坏点有大小的限制,不可以无限制的校正。
sensor的静态坏点表一旦写入存储,dpc模块会自动替换坏点表中所示坏点。
算法
略
tuning
每个平台标定方法各不相同,但是一般情况下都是根据以下几个步骤进行标定:
- 在黑暗坏境下标定亮点坏点。
- 在有光均匀图像的环境下标定暗点。
- 合并坏点表。
动态坏点校正
动态坏点的校正可以实时的检测和校正sensor 的亮点与暗点,并且校正的坏点个数不受限制。动态坏点校正相对静态坏点校正具有更大的不确定性。
动态dpc可以分为两个步骤,分别为坏点检测和坏点校正。
算法
这里自己写了一个dpc的算法,有兴趣的话可以看看。
此算法使用梯度百分比的方式去检测坏点,检测到坏点之后通过中值滤波进行坏点校正,最终通过alpha混合的方式计算出最终的计算结果。
code
close all;clear;
clc;
%% variable
dp_slope = 0.02;
dp_thresh = -0.3;
r=3; %Stencil radius
%% read raw image
% x = 0:255;
% y = dp_slope * x + dp_thresh;
% y(y<0) = 0;
% y(y>1) = 1;
% figure,
% plot(0:255,y)
% axis([0 255 0 1.5])
[filename, pathname] = ...
uigetfile({'*.raw'}, 'select picture');
str = [pathname filename];
fp = fopen(str, 'rb');
[X,l] = fread(fp, [1920,1080], 'uint16');
fclose(fp);
img = uint8(X/16)';
[height, width] = size(img);
img_correct = zeros(height, width);
%% Image edge extension
imgn=zeros(height+2*r,width+2*r);
imgn(r+1:height+r,r+1:width+r)=img;
imgn(1:r,r+1:width+r)=img(1:r,1:width);
imgn(1:height+r,width+r+1:width+2*r+1)=imgn(1:height+r,width:width+r);
imgn(height+r+1:height+2*r+1,r+1:width+2*r+1)=imgn(height:height+r,r+1:width+2*r+1);
imgn(1:height+2*r+1,1:r)=imgn(1:height+2*r+1,r+1:2*r);
%% dp algorithm
for i = r+1:height-r
for j = r+1:width-r
img_r = imgn(i-r:2:i+r, j-r:2:j+r);
data_r_center = img_r(r, r);
data_r_diff(1:r+1, 1:r+1) = abs(img_r - img_r(r,r));
data_r_sort = sort(img_r(:));
data_r_median = data_r_sort(r*2+1);
data_r_detect = data_r_diff * dp_slope + dp_thresh;
data_r_detect(data_r_detect < 0) = 0;
data_r_detect(data_r_detect > 1) = 1;
data_r_judge = sum(sum(data_r_detect > 0));
data_r_weight = sum(sum(data_r_detect)) / data_r_judge;
if i-r == 18 && j-r == 43
a = 1;
end
if data_r_judge >= 7
data_r_correct = data_r_median * data_r_weight + (1-data_r_weight) * data_r_center;
else
data_r_correct = data_r_center;
end
img_correct(i-r, j-r) = data_r_correct;
end
end
%% show
figure,imshow(uint8(img));
figure,imshow(uint8(img_correct));
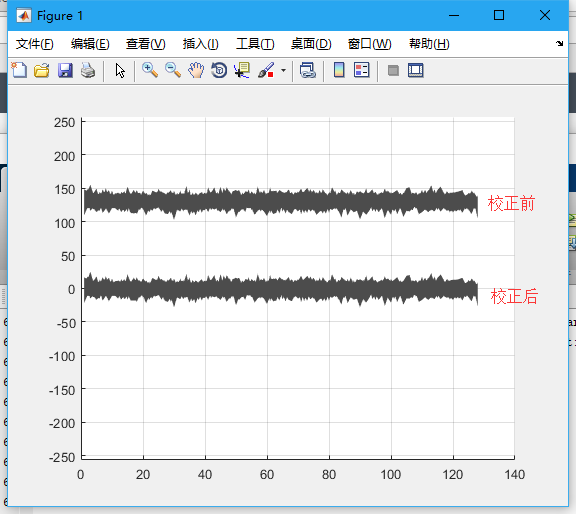
效果展示:
")
")
tunning
dpc的调试可以提升图像的多个方面,很大程度上改善图像质量,一般情况下在不同的iso下调出不同的值,需要考虑的一是blend的混合程度,二是坏点检测的力度。在噪声比较多的情况下可以加强dpc的强度,但是建议不要把dpc当成去噪来使用,dpc校正太强依旧会造成边缘偏色、整体偏色的现象。
以上是 ITD-拖影角度测量(DPC) 的全部内容, 来源链接: utcz.com/a/65728.html