大疆精灵4RTK自定义三位航线规划(开源)
大疆精灵4rtk是无人机摄影测量行业的一款里程碑式的产品,极大地拓展了无人机摄影测量的应用领域。然而,大疆官方只提供了有限的航线规划功能,如带状航线、井字航线,5向飞行,仿地飞行等等。然而,在很多场合下这些功能并不能满足我们的要求。比如,有时候我们需要对某些目标进行精细三维重建,那么大疆提供的航线规划功能就远远不能满足了。
对于这种比较复杂的航线规划任务,武汉大学张祖勋院士团队提出了”贴近摄影测量“的概念,并和大疆合作提出了基于云平台的解决方案,与此类似的,Metashape软件(也就是photoscan的新版本)也增加了相应的航线规划功能。然而,这两种解决方案都需要先对重建目标进行初步简单的拍摄,并对初次拍摄得到的照片进行三维重建得到一个比较粗糙的模型,然后基于这个粗模进行航线规划,进行第二次比较精细的拍摄,进而三维重建得到精细的模型。
对于那些结构比较复杂的目标,我们可以采用这种方式,然而有些结构比较简单的目标,比如塔、烟囱、桥墩、柱子、独立树等等,我们只需要知道其简单的位置、高度和半径等先验信息就可以进行航线规划了,完全可以做到一次规划就完成任务,没必要像上文中那样先粗后细。
也正因此,有些公司推出了相应的产品,如waypoint master等,然而,这类软件一般都是收费的,且价格不菲(8000-16000不等)。对于小单位或者科研单位来说,能买几架25000的精灵四RTK就很心疼了,又怎么有富裕钱去买这样的软件呢?另外,这样的产品所提供的航线规划功能是固定的,用户也不能按照自己的特殊需求来自己定义航线。因此,对于经济条件一般的P4R用户来说,很难下定决心去使用这样的产品。
我本人经济条件一般,碰巧又需要特殊的航线规划功能,无奈只能自己探索,经过一段时间的尝试,终于实现了自定义的航线规划程序,并且将其开源到了GitHub上面,希望对处于类似境况又有类似需求的朋友们能有所帮助。
GitHub地址
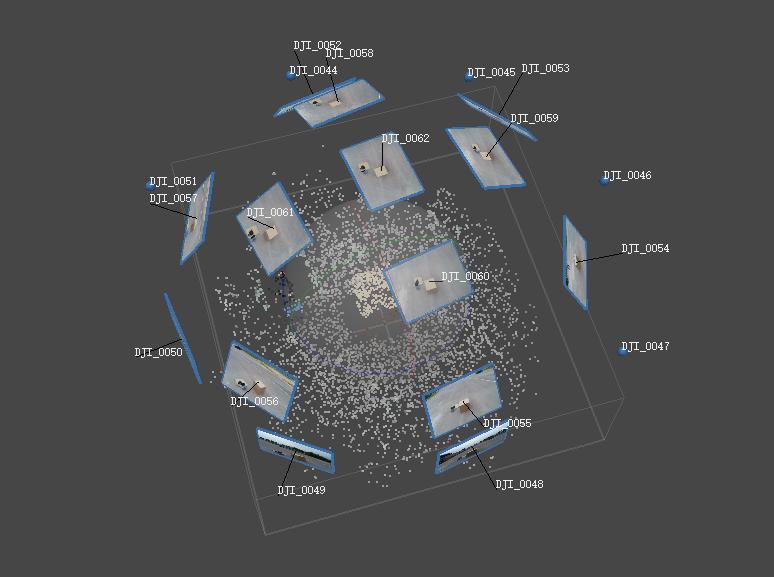
程序很简单,按照readme里的介绍生成kml文件后导入到DJI Pilot app里就可以让精灵4RTK按照自己的想法飞了(遥控器必须是SDK版本的)。不过目前只实现了半球形航线规划,大家完全可以改一改代码来规划自己需要的航线。最后看一下效果图:

以上是 大疆精灵4RTK自定义三位航线规划(开源) 的全部内容, 来源链接: utcz.com/a/52366.html