碰撞检测——GJK算法
基本概念
闵可夫斯基差(Minkowski difference)
凸体和
两个物体相交,当且仅当其闵可夫斯基差包含原点。
单纯形(simplex)
这里相当于在闵可夫斯基差内迭代形成一个多面体,且尽可能地使其包含原点。若其包含原点,则闵可夫斯基差包含原点,物体相交。
支持函数(support function)
即物体在方向上最远的点
有定理
算法
function GJK_intersection(shape p, shape q, vector initial_axis):vector A := Support(p, initial_axis) − Support(q, −initial_axis)
simplex s := {A}
vector D := −A
loop:
A := Support(p, D) − Support(q, −D)
if dot(A, D) < 0:
reject
s := s ∪ A
s, D, contains_origin := SimplexOrigin(s)
if contains_origin:
accept
原点判定
线段
前面由判定过,所以原点不可能在
和
区域。那么若
,则原点在线段上。
的方向为垂直于
指向原点,作为下一次搜索方向。
三角形
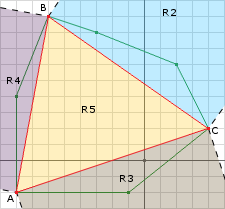
前面由判定过,所以原点不可能在
(白色)区域。
点为最新加入的点,即上次搜索方向为远离
指向
的方向,所以原点不可能在
区域。
原点在区域,当且仅当
。
的方向为垂直于
指向原点,作为下一次搜索方向。
原点在区域,当且仅当
。
的方向为垂直于
指向原点,作为下一次搜索方向。
四面体(tetrahedron)
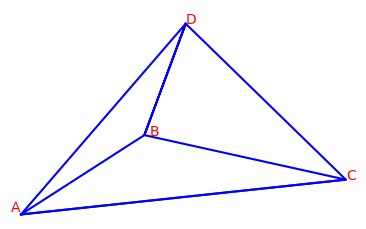
前面由判定过,所以原点不可能在
面外部区域。
原点在四面体内当且仅当原点同时在面、面
和面
内部区域。比较点
到各顶点的向量在该顶点所对的面的法向上的投影和点
到原点的向量在该法向上的投影,判定原点是否在该面内部区域。
原点在面内区域当且仅当
原点在面内区域当且仅当
原点在面内区域当且仅当
若原点不在四面体内,那么必在其中一个面外区域,删除该面所对的顶点,剩下的进入上一步的三角形判定程序。
程序
constexprfloat EPSILON = 1e-6f;Vector3f MinkowskiDifferenceSupport(const PolyhedralConvexShape &shape1,
const PolyhedralConvexShape &shape2, const Vector3f &dir)
{
Vector3f a = shape1.localGetSupportingVertex(dir);
Vector3f b = shape2.localGetSupportingVertex(-dir);
return a - b;
}
boolSimplex2(vector<Vector3f> &s, Vector3f &d)
{
Vector3f A = s[1];
Vector3f B = s[0];
Vector3f AB = B - A;
Vector3f AO = - A;
Vector3f ABOO = AB.cross(AO).cross(AO); // norm to AB toward origin
if(ABOO.norm() <= EPSILON) // origin lies on
{
returntrue;
}
else
{
d = ABOO;
returnfalse;
}
}
boolSimplex3(vector<Vector3f> &s, Vector3f &d)
{
Vector3f A = s[2];
Vector3f B = s[1];
Vector3f C = s[0];
Vector3f AB = B - A;
Vector3f AC = C - A;
Vector3f AO = - A;
Vector3f ABC = AB.cross(AC);
Vector3f ACBB = AC.cross(AB).cross(AB); // norm to AB toward far from C
Vector3f ABCC = AB.cross(AC).cross(AC); // norm to AC toward far from B
if(ACBB.dot(AO) > EPSILON) // origin lies on outside of AB
{
d = ACBB;
returnfalse;
}
if (ABCC.dot(AO) > EPSILON) // origin lies on outside of AC
{
d = ABCC;
returnfalse;
}
float dot = ABC.dot(AO); // origin lies in ABC region
if(dot > EPSILON)
{
d = ABC;
returnfalse;
}
elseif(dot < EPSILON)
{
d = -ABC;
returnfalse;
}
else// origin lies in ABC triangle
{
returntrue;
}
}
boolSimplex4(vector<Vector3f> &s, Vector3f &d)
{
Vector3f A = s[3];
Vector3f B = s[2];
Vector3f C = s[1];
Vector3f D = s[0];
Vector3f AO = - A;
Vector3f AB = B - A;
Vector3f AC = C - A;
Vector3f AD = D - A;
Vector3f ABC = AB.cross(AC); // normal to ABC
Vector3f ACD = AC.cross(AD); // normal to ACD
Vector3f ADB = AD.cross(AB); // normal to ADB
float AD_ABC = ABC.dot(AD); // AD project on normal of ABC
float AB_ACD = ACD.dot(AB); // AB project on normal of ACD
float AC_ADB = ADB.dot(AC); // AC project on normal of ADB
float AO_ABC = ABC.dot(AO); // AO project on normal of ABC
float AO_ACD = ACD.dot(AO); // AO project on normal of ACD
float AO_ADB = ADB.dot(AO); // AO project on normal of ADB
bool inside_ABC = AD_ABC * AO_ABC > EPSILON;
bool inside_ACD = AB_ACD * AO_ACD > EPSILON;
bool inside_ADB = AC_ADB * AO_ADB > EPSILON;
if(inside_ABC && inside_ACD && inside_ADB) // origin inside tetrahedron
{
returntrue;
}
elseif(!inside_ABC) // origin outside ABC
{
// remove D
s[0] = s[1];
s[1] = s[2];
s[2] = s[3];
s.pop_back();
}
elseif(!inside_ACD) // origin outside ACD
{
// remove B
s[2] = s[3];
s.pop_back();
}
else// origin outside ADB
{
// remove C
s[1] = s[2];
s[2] = s[3];
s.pop_back();
}
return Simplex3(s, d);
}
boolSimplexOrigin(vector<Vector3f> &s, Vector3f &d)
{
bool contain_origin = false;
switch (s.size())
{
case2: // line segment
contain_origin = Simplex2(s, d);
break;
case3: // triangle
contain_origin = Simplex3(s, d);
break;
case4: // tetrahedron
contain_origin = Simplex4(s, d);
break;
default:
break;
}
return contain_origin;
}
boolgjkAlgorithm(const PolyhedralConvexShape &shape1,
const PolyhedralConvexShape &shape2)
{
// center difference as initial direction
Vector3f dir = shape1.getCenter() - shape2.getCenter();
if(dir.norm() < 0.001f)
dir = Vector3f{1.0f, 0.f, 0.f};
dir.normalize();
// init
vector<Vector3f> simplex;
simplex.reserve(4);
Vector3f simplex_point = MinkowskiDifferenceSupport(shape1, shape2, dir);
simplex.push_back(simplex_point);
dir = -simplex_point;
// main loop
int max_iteration = max(shape1.getNumVertices(), shape2.getNumVertices());
while(max_iteration-- > 0)
{
simplex_point = MinkowskiDifferenceSupport(shape1, shape2, dir);
if(simplex_point.dot(dir) < 0)
returnfalse;
simplex.push_back(simplex_point);
if(SimplexOrigin(simplex, dir))
returntrue;
}
returnfalse;
}
测试
参考
- [1] dyn4j: GJK (Gilbert–Johnson–Keerthi)
- [2] BulletCollision/NarrowPhaseCollision/btGjkPairDetector.cpp
- [3] wiki: Gilbert–Johnson–Keerthi distance algorithm
- [4] E. G. Gilbert, D. W. Johnson and S. S. Keerthi, "A fast procedure for computing the distance between complex objects in three-dimensional space," in IEEE Journal on Robotics and Automation, vol. 4, no. 2, pp. 193-203, April 1988, doi: 10.1109/56.2083
- [5] Christer Ericson. 2004. Real-Time Collision Detection. CRC Press, Inc. USA. Chapter 9.5, pp. 399-410.
以上是 碰撞检测——GJK算法 的全部内容, 来源链接: utcz.com/a/29640.html