如何使用DRV8833电机控制器控制电机的速度
直流电机可以在许多设备中找到。在自己动手的项目中,它们可用于创建机器人,例如智能汽车四处行驶并避开障碍物。这种电机可以打开和关闭,我们无法控制旋转速度或方向。
为了控制这种电机,设计了一些控制器。它们采用包含H 桥的集成电路形状。你可以在市场上找到许多驱动板。它们在支持的电机数量或功率方面有所不同。使用更多安培的更强大的电机将需要更好、更昂贵的电机控制器。
对于Arduino等廉价机器人套装,您通常可以使用更弱、更便宜的控制器,或者也可以使用将电机控制器与其他机器人功能( Arduino、RaspiRobot、Rover 5等)集成的板。
在本教程中,我将说明由Pololu DRV8833控制器控制的双电机驱动器速度原理。它是一种更便宜的驱动器,旨在与较弱的电机一起使用 - 就像小型机器人中的电机一样。其他电机控制器也应该以非常相似的方式工作,但不完全相同。
板图如下所示。默认情况下,引脚不会被焊接。
在右侧,从顶部开始,我们连接电机的电源,然后最多连接两个电机。在左侧,我们有微控制器接地 (GND) 引脚以及每个电机的两个 PWM 引脚(第一个控制正方向的旋转,第二个控制相反方向的旋转)。当电路板工作时,它可能会变得很热,所以要小心。
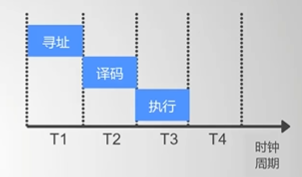
微控制器可以告诉电机控制器打开或关闭电机,控制其速度和方向。它是由脉宽调制- PWM完成的。微控制器将时间划分为非常短的周期。在每个周期中,PWM引脚的一部分可能处于高电平或低电平状态。根据该周期处于高状态的时间占比,可以获得介于0和最高电压之间的任何电压。电机控制器对该值做出反应并增加或减少发送到电机的功率。
打开PWM,然后将duty“占空比”设置为0到1023。占空比是引脚处于高电平状态的周期的一部分。值越大电机获得的功率越大,旋转速度越快。对于某些设置,电机将无法以低占空比值移动。
以上是 如何使用DRV8833电机控制器控制电机的速度 的全部内容, 来源链接: utcz.com/z/507763.html