ROS机器人操作系统教学与应用的思考
转自https://blog.csdn.net/ZhangRelay/article/details/79118888
首先,非常感谢睿慕课提供这样一个宝贵的机会(大会相关报道:19日,20日),讲稿内容是关于我们如何利用互联网、大数据并结合学生认知规律等认真上好一门机器人课程的故事。大会视频介绍链接,具体内容如下:

01->我们讲稿和其他嘉宾差异较大,并没有前沿知识和技术创新等,主要是关于如何在教育上应用这些创新的案例。受刘博委托介绍一下从事ROS机器人教育的一些工作。其实我的内心是非常惶恐的,因为自己的工作并不多,很多也在尝试之中,只能算是心得体会的交流,错误之处还望各位嘉宾多多指正。这里想先说明一下自己理解的教育,其实并不是直接进行技术创新的领域,是应用技术创新的领域。

02->以上是讲稿的四个主要部分,首先简单介绍一下ROS,为什么选择ROS作为机器人教育的一个载体,第二个是易科在线上和线下参与的一些ROS活动经验、启发和相关数据分享,然后介绍一下自己在高校机器人教学中的一些探索和尝试,最后是总结和展望。

03->首先我们来看一下ROS,涉及机器人控制、算法、仿真等多个方面,能将机器人理论、编程、仿真和实践进行有机的融合(在ROS下整合在一起,而不是简单的组合),这是我们选择ROS的一个重要原因。

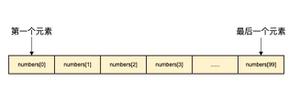
04->

05->

06->截止到2017年,全球共有超过2800开发人员参与其中,贡献了累计450万行的核心代码并开源。

07->

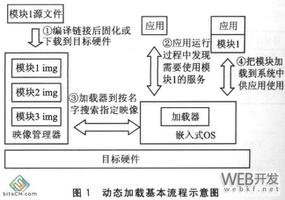
08->ROS1没有完全独立于操作系统。系统、软件包、网络、ROS和外设之间的关系。依据这些关联性和内在联系,开设四门机器人课程,并将ROS应用到课程的实践环节。机器人系统设计与控制技术,主要讲述机器人基本设计方法和理论,并介绍ROS基础;机器人感知与信息融合技术,主要讲述机器人所用的传感器和相关滤波算法,并用ROS演示如何连接这些传感器,并应用这些算法等;人机智能交互技术,主要讲述常见的人机交互模式,如图形化界面、语音识别、物体识别、环境建模理解、手势交互等,并使用ROS进行实践环节讲解;智能机器人综合实训,将上述专题知识点进行重新梳理整合,加强学生的应用能力。四门课程独立性、相关性、层次性分明,设计机器人和ROS多个方面,便于学生理解课程设置的内在联系(即学习这些课程的意义),知识迁徙和技能训练并重。

09->(信息技术不断更新和发展,知识时效性的问题开始凸显,课程需要紧密结合前沿)上图所示是ROS 2与ROS 1整体架构的对比: ROS 1主要支持Ubuntu。ROS 2底层基于DDS通信机制,支持实时性、嵌入式、分布式、多操作系统,包括Linux、windows、Mac、RTOS等。 ROS 1的通讯使用TCPROS/UDPROS,依赖master,而ROS 2的通讯系统是基于DDS,无master,同时在ROS2内部提供了DDS的抽象层实现,有了这个抽象层,用户就可以不去关注底层的DDS使用了哪个商家的API。 ROS 2目前已经在Ubuntu Xenial、OS X El Capitan以及Windows 10上进行了测试和支持,并已经发布了第一个正式版。(培养学生对比学习的技能)

10->引导学生注意差异性,思考为什么做了这些改进。

11->大量的机器人提供了ROS接口或者直接使用ROS,应用广泛,通用性强。

12->在基本了解ROS后,简单介绍ROS教研体系,分为职业和高校两部分,我们并不是单纯介绍推广ROS,在职业培训中在ROS中补充机器人知识,在高校教学中在机器人理论中补充一些ROS实践内容,针对不同的培训人员,设置个性化培训方案。

13->创始人简介

14->这些是一些网络资源,在不断的优化改进,一开始博文、视频、然后有镜像,再到在线学习实践的平台,目标是不断降低学习的门槛,后面会具体介绍。从单一资料视频分享,到镜像分享,然后发现一些问题,针对问题进行完善,现在通过一个网页就可以轻松学习ROS。发布不到半年时间已经有3000+用户,反馈非常多的问题,有很多宝贵的经验,展开讲解。

15->深圳创想未来机器人有限公司的高校课程方案,特色是在实践中学习。

16->公开课--差异性

17->公开课--层次性

18->虽然翻译了很多书籍,但是我们依然推荐大家直接阅读英文资料,这些工作只是为了帮助降低ROS的学习门槛。

19->工作两年,利用业余时间去过多地,主要观察机器人兴趣班开设情况、机器人企业用人需求、高校机器人教学交流,发现不同城市在机器人教育,包括高校和中小学,差异是非常巨大的。
课程数据来自实验楼。这里要讲一个非常重要的问题,学生的“向前走”和老师的“回头看”,通俗而言,学生学习的知识是全新的,而老师是在掌握知识全部的基础上,进行梳理讲解,这个过程在心理认知上属于不同的阶段。老师依据自己的理解把握重难点和每个知识点的讲解时间,是不符合学生学习时,感受的知识重难点、知识点消化时间也不同。传统的博客视频等方式无法获取到学生有效学习的时间,目前依据学生的完成率和有效学习时间,可以准确预估学生在每个知识点上所用的时间,更好的改进教学时间的分配,如果只用到这么一个功能那就太过肤浅了。下面再举一个重要的例子,通常在教学中有一类学生最容易被忽视,就是学习时间长,但是学习效果一般的,但是如果用数据就非常明显(有效学习时间长、完成度一般),这些学生通常比较内向,不多交流,有问题自己苦苦思索,应用这些数据,主动去关心和帮助这些学生,去让他们更好更快的成长。课程问答也能够很好的了解学生感兴趣的问题和学生视角的重难点。

20->总结一下,上面就是我们所做的一些工作的介绍和经验。我们一直致力于做深入浅出入门轻松,新颖有趣启发性强的机器人课程。

21->让教室变成实验室,让理论贴近生活。知识迁移和思维训练并重的课程教学模式,展开教学设计。
如何将鲜活的知识与严密的思维紧密结合?首先,要回答一个问题:
为什么这么做?我考虑了如下三个问题。

22->第一个问题,人才培养与人才梯度的问题(人工智能与机器人人才缺口大)。分为三个方面考虑(教育资源分配不均加剧断层):
1 人才断层
成本高、资源浪费并存,重点大学相关人才起薪高,普通高校找工作难。
人才断层导致分工困难,由上而下,无法顺利完成,主管能力的“地平线”,是下属能力的“天花板”。
2 培养周期
没有良好思维训练等,没有树立终身学习等(铁饭碗等陈旧观念),断层后直接遇到天花板,无法成长,不能形成良性循环。
3 智慧型机器人对工作机会的取代,导致对人才要求的不断提高
标准化的工作迟早会被人工智能和机器人取代,标准化的教育也无法培养个性化的人才。明明学习的知识越来越多,为何越来越无用呢?
第一个问题是关于市场需求和人的发展的问题,下面我们需要什么样的课程让学生学习效果最好,效率最高。

23->什么样的课程符合人性和认知规律,高效且有活力?
现有的课程比如工科课程,多按知识和技术进行章节划分,是否考虑到不同学校不同学生的认知规律。从学生的认知进行展开讲述课程教案设计的案例。
合格的程序--优雅的程序--突破性的程序之间的差异性。
总结,讲得再好不如学生主动去学。机器人学科有什么自己的特点呢?

24->交叉学科,技术和艺术、融合和组合的区别。那么如何做?

25->如同航海如同登山,不是简单的告知学生航海线路和登山路径。而是教会他们航海或登山的技能和要点,让他们自由的选择符合自身特点的道路,有人快有人慢,但终究能够到达目的地和山顶,欣赏到属于自己的风景。
因材施教,千人千面与千面一心(太史公有言,天下熙熙皆为利来,天下攘攘皆为往)。学生利益的最大化是教育的初心,传道授业解惑。
什么是教育的本质?让学生认知自身,认识世界,知道自己的能力能做什么,社会需要什么样的人才,结合自身的不断努力,走属于自己的人生道路。
以上是 ROS机器人操作系统教学与应用的思考 的全部内容, 来源链接: utcz.com/a/68878.html